Software
Interactive C
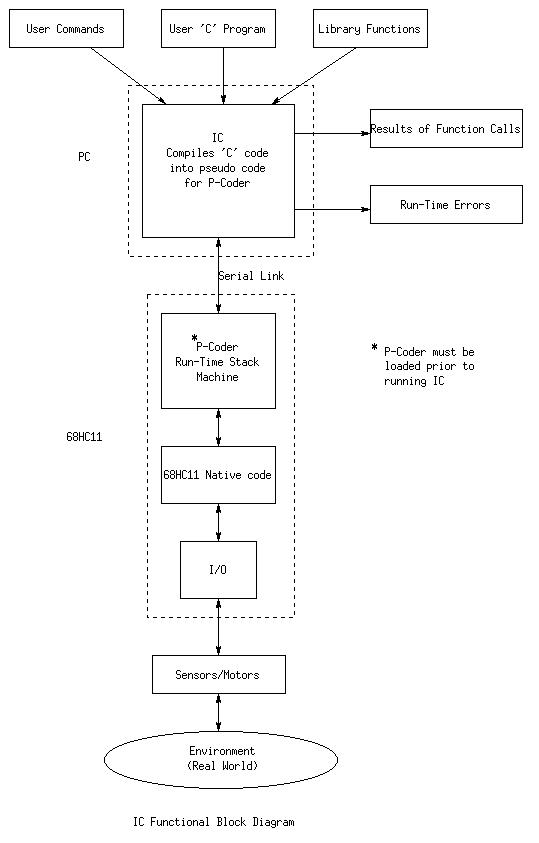
The development tool for the used for the The Handy Board is called Interactive C (IC). IC is basically consist of two parts, a pseudo-code (pcode) machine language module and the interface/compiler portion (IC program).
IC compiles into pseudo-code (p-code) which is then executed by a custom stack machine. The p-code is interpreted by a run-time machines language program store in the 6811 MPU. This unique approach was taken because it allows IC to have run-time error check, small object code, source code portability and finally the most useful and powerful feature, multi tasking. The only drawback is at the expense of slower execution speed. However, this should not be a problem with most applications.
IC supports a subset of C, it includes:
-
Control structure; for, while, if, else
Local, global variables
Arrays, Pointers
16, 32 bits integers
32 bits floating point numbers
Here is a block diagram of how IC works.
IC Library functions
DC Motors
void fd(int m)
Turns motor m on in the forward direction. Example: fd(3);
void bk(int m)
Turns motor m on in the backward direction. Example: bk(1);
void off(int m)
Turns off motor m. Example: off(1);
void alloff(), void ao()
Turns off all motors. ao is a short form for alloff.
void motor(int m, int p)
Turns on motor m at power level p. Power levels range from 100 for full
on forward to -100 for full on backward.
-
void servo_on()
-
Enables PA7 servo output waveform.
-
Disables PA7 servo output waveform.
-
Sets length of servo control pulse. Value is the time in
half-microseconds of the positive portion of a rectangular wave that
is generated on the PA7 pin for use in controlling a servo motor.
Minimum allowable value is 1400 (i.e., 700 sec); maximum is 4860.
-
Sets servo angle in radians.
-
Sets servo angle in degrees.
-
int digital(int p)
-
Returns the value of the sensor in sensor port p, as a true/false
value (1 for true and 0 for false).
-
Returns value of sensor port numbered p. Result is integer between 0 and
255.
-
int stop_button()
-
Returns value of button labeled Stop: 1 if pressed and 0 if released.
-
Returns value of button labeled Start.
-
Waits for Stop button to be pressed, then released. Then issues a short
beep and returns.
-
Like stop_press, but for the Start button.
-
Returns the position of a knob as a value from 0 to 255.
-
int sony_init(1)
-
Enables the infrared driver.
-
Disables the infrared driver.
-
Returns the data byte last received by the driver, or zero if no data
has been received since the last call.
-
void reset_system_time()
-
Resets the count of system time to zero milliseconds.
-
Returns the count of system time in milliseconds.
-
Returns the count of system time in seconds, as a floating point
number. Resolution is one millisecond.
-
Waits for an amount of time equal to or slightly greater than sec
seconds.
-
Waits for an amount of time equal to or greater than msec
milliseconds. msec is a long integer.
-
void beep()
-
Produces a tone of 500 Hertz for a period of 0.3 seconds.
-
Produces a tone at pitch frequency Hertz for length seconds. Both
frequency and length are floats.
-
Sets the beeper tone to be frequency Hz. The subsequent function is
then used to turn the beeper on.
-
Turns on the beeper at last frequency selected by the former function.
-
Turns off the beeper.
-
int start_process( function-call( : :):, [TICKS] , [STACK-SIZE] )
-
start_process returns an integer, which is the process ID assigned
to the new process.
-
kills all currently running processes.
-
prints out a list of the process status. The following information
is presented: process ID, status code, program counter, stack pointer,
stack pointer origin, number of ticks, and name of function that is
currently executing.
-
Allocates an additional 256 milliseconds of execution to the currently
running process.
-
Makes a process swap out immediately after the function is called.
-
float sin(float angle)
-
Returns sine of angle. Angle is specified in radians; result is in radians.
-
Returns cosine of angle. Angle is specified in radians; result is in radians.
-
Returns tangent of angle. Angle is specified in radians; result is
in radians.
-
Returns arc tangent of angle. Angle is specified in radians; result
is in radians.
-
Returns square root of num.
-
Returns logarithm of num to the base 10.
-
Returns natural logarithm of num.
-
Returns 10 to the num power.
-
Returns e to the num power.
-
Returns a to the b power.
-
int peek(int loc)
-
Returns the byte located at address loc.
-
Returns the 16-bit value located at address loc and loc+1. loc has the
most significant byte, as per the 6811 16-bit addressing standard.
-
Stores the 8-bit value byte at memory address loc.
-
Stores the 16-bit value word at memory addresses loc and loc+1.
-
Sets bits that are set in mask at memory address loc.
-
Clears bits that are set in mask at memory address loc.
Here is an hierarchical sturcture of the IC library functions in relations
to user programs.

Software model
The main function of the robot is to gather information from all of its sensors
and decide what to do from the information collected. It must constantly
poll, 4 infrared(edge), 4 ultrasound, and 4 contact sensors.
In addition to checking the sensors, the motors are controlled via an open loop
system with no feedbacks. Therefore it must use some timing function
to control its maneuvers such as turning. The multi-tasking function and time
commands of IC seems ideally suited for this application.

The ellipses are individual tasks. The sensors checking tasks writes the result of its sesnsor test to global variables. The "Main Program" polls these global variables and decides on what to do. It also have to make sure that only one "Move Robot" task can be active at a time. This information is communicated to the "Main Program" via task status global variables.
/*****************************************************
***** Dave's Multi-tasking Sumo Robot Program *****
***** Version .91 May 18, 97 *****
*****************************************************/
/*****************************************************
********** Global Variablies **************
*****************************************************
********** Common fixed values **************
*****************************************************/
int moving=1,
not_moving=0,
robot_status,
running=1,
not_running=0;
/*****************************************************
********** Analog ports *************
*****************************************************
*********** Infared edge sensors ***************
*****************************************************
****** Values for edge ******
****** 1 = fl_edge ******
****** 2 = fr_edge ******
****** 4 = rl_edge ******
****** 8 = rr_edge ******/
int rr_edge=0,
rl_edge=1,
fr_edge=2,
fl_edge=3,
first_edge=0,
last_edge=3,
suface_value=0,
off_edge_value=0,
white_value=0,
temp_edge=0,
edge=0;
/*****************************************************
************** Digital Ports ***************
*****************************************************/
int left_ultra=12,
front_left_ultra=13,
front_right_ultra14,
right_ultra=15,
first_ultra=12,
last_ultra=15,
ultra=0,
temp_ultra=0;
int left_contact=7,
right_contact=8,
/*front_contact=xx,
rear_contact=xx,*/
first_contact=7,
last_contact=8,
contact=0,
temp_contact=0;
/*****************************************************
******** Direction, Speed, and Duration **********
*****************************************************/
int fast=100,
medium=50,
slow=11,
forward=1,
right=2,
left=3,
fast_pivot=100,
slow_pivot=50,
reverse=-1;
long forever=255l;
/*****************************************************
********* Process ID's **************
*****************************************************/
int edge_pid,move_pid,contact_pid,ultra_pid,
edge_evade_pid,contact_evade_pid,tracking_pid;
/*****************************************************
********* Process Status **************
*****************************************************/
int edge_status,move_status,ultra_status,contact_evade_status,
edge_evade_status,tracking_status;
int edge_evade_stage1=not_running;
/*****************************************************
******** Sensor Checking Taskes ***********
*****************************************************
******** Edge detection Analog ports 0-3 ***********
*****************************************************/
void check_edge()
{
int x,e;
while(1)
{
e=0;
for (x=first_edge; x<=last_edge; x++)
{
e <<= 1; /* shift e 1 bit to the left */
if (analog(x) <= white_value) /*||analog(x) >= off_edge_value)*/
e |= 1; /* OR e with 0001 */
}
/*printf("edge=%d e=%d\n",edge,e);*/
if (e != edge)
edge=e;
}
}
/*****************************************************
****** Contact sensors, Digital ports 7-10 *******
*****************************************************/
void check_contact()
{
int x,c;
while(1)
{
c=0;
for (x=first_contact; x<=last_contact; x++)
{
c <<= 1; /* shift c 1 bit to the left */
if (digital(x))
c |= 1; /* OR c with 0001 */
}
/*printf("contact=%d c=%d\n",contact,c);*/
if (c != contact)
contact=c;
}
}
/*****************************************************
****** Obstacle detection Digital ports 12-15 *******
*****************************************************/
void check_ultra()
{
int u,x,y,z;
while (1)
{
u=0;
for(x=first_ultra; x<=last_ultra; x++) /* left to right */
{
u <<= 1; /* shift u 1 bit to the left */
if(digital(x))
u |= 1; /* OR u with 0001 */
}
printf("ultra=%d u=%d\n",ultra,u);
if (u != ultra)
ultra=u;
}
}
/*****************************************************
********* Move robot **************
*****************************************************/
void move(int direction, int speed, long duration)
{
int sp1,sp2;
long dur;
move_status=running;
if(direction==forward||direction==reverse)
{
sp1=direction*speed;
sp2=sp1;
}
else if(direction==right)
{
sp1=reverse*speed;
sp2=speed;
}
else if(direction==left)
{
sp1=speed;
sp2=reverse*speed;
}
robot_status=moving;
motor(0,sp1);
motor(1,sp2);
motor(2,sp2);
motor(3,sp1);
if (duration!=forever)
{
dur=mseconds();
while(duration >= mseconds()-dur);
ao();
robot_status=not_moving;
}
move_status=not_running;
kill_process(move_pid);
}
/*****************************************************
************ Edge Evasive Maneuver ***************
*****************************************************/
void edge_evade()
{
int dir,temp;
edge_evade_status=running;
temp=temp_edge;
/********** move away from edge ***********/
/* front edge detectors dir=reverse */
/* rear edge detectors dir=forward */
if (temp==1||temp==2||temp==3)
dir=reverse;
else if (temp==4||temp==8||temp==12)
dir=forward;
edge_evade_stage1=running;
robot_status=moving;
move_pid=start_process(move(dir,fast,forever));
while (robot_status==moving);
edge_evade_stage1=not_running;
/****** turns towards the centre of platform ******/
if (temp==2||temp==8)
dir=left;
else if(temp==1||temp==4)
dir=right;
msleep(300l);
move_status=running;
move_pid=start_process(move(dir,medium,1500l));
while (move_status==running);
/******* move towards centre of platform **********/
move_status=running;
move_pid=start_process(move(forward,slow,750l));
while(move_status==running);
edge_evade_status=not_running;
kill_process(edge_evade_pid);
}
/*****************************************************
********** Contact Evasive Maneuver **************
*****************************************************/
void contact_evade()
{
int c_dir;
contact_evade_status=running;
/* left contact c_dir=right speed=fast_pivot duration=500l */
/* right contact c_dir=left speed=fast_pivot duration=500l */
/* front contact c_dir=forward speed=fast duration=forever */
/* rear contact c_dir=reverse speed=fast duration=forever */
if (temp_contact==1) /* right contact */
c_dir=left;
else if (temp_contact==2) /* left contact */
c_dir=right;
robot_status=moving;
move_status=running;
if (temp_contact <= 2 && temp_contact !=0)
move_pid=start_process(move(c_dir,fast,forever));
while(contact==temp_contact);
contact_evade_status=not_running;
kill_process(contact_evade_pid);
}
/*****************************************************
************ Obsticle Tracking ***************
*****************************************************/
void tracking()
{
tracking_status=running;
if(temp_ultra==1)
move_pid=start_process(move(right,slow,forever));
if(temp_ultra==2||temp_ultra==3||temp_ultra==4||temp_ultra==6||temp_ultra==12)
move_pid=start_process(move(forward,slow,forever));
if(temp_ultra==8)
move_pid=start_process(move(left,slow_pivot,forever));
tracking_status=not_running;
kill_process(tracking_pid);
}
/*****************************************************
*****************************************************
*****************************************************
*****************************************************
*****************************************************
************ Main Program ***************
*****************************************************
*****************************************************
*****************************************************
*****************************************************
*****************************************************
*****************************************************/
void main()
{
int e,m,k,x,y,z;
ao(); /* make sure that all motors and relays are off */
k=1;
/* Initalize edge sensor values */
for(x=first_edge; x<=last_edge; x++)
{
z=0;
for(y=0; y<=10; y++)
z=z+analog(x);
z=z/10;
suface_value=suface_value+z;
k++;
}
suface_value=suface_value/k;
white_value=suface_value-20;
if (suface_value+5 > 253)
off_edge_value=253;
else
off_edge_value=suface_value+5;
edge_pid=start_process(check_edge());
contact_pid=start_process(check_contact());
ultra_pid=start_process(check_ultra());
/* Main loop */
while (1)
{
if(edge!=temp_edge)
{
if(edge!=0)
{
if(edge_evade_status==running)
{
kill_process(edge_evade_pid);
edge_evade_status=not_running;
}
if(contact_evade_status==running)
{
kill_process(contact_evade_pid);
contact_evade_status==not_running;
}
if(tracking_status==running)
{
kill_process(tracking_pid);
tracking_status=not_running;
}
if(move_status==running)
{
kill_process(move_pid);
move_status=not_running;
}
ao();
robot_status=not_moving;
temp_edge=edge;
edge_evade_pid=start_process(edge_evade());
}
else
{
if(edge_evade_stage1==running&&robot_status==moving)
{
ao();
robot_status=not_moving;
if (move_status==running)
kill_process(move_pid);
}
temp_edge=edge;
}
}
else if(contact!=temp_contact&&edge_evade_status==not_running)
{
if(contact!=0)
{
if(tracking_status==running)
{
kill_process(tracking_pid);
tracking_status=not_running;
}
if(move_status==running)
{
kill_process(move_pid);
move_status=not_running;
}
ao();
robot_status=not_moving;
temp_contact=contact;
contact_evade_pid=start_process(contact_evade());
}
else if(contact_evade_status==running || robot_status==moving)
{
if (contact_evade_status==running)
{
kill_process(contact_evade_pid);
contact_evade_status=not_running;
}
ao();
robot_status=not_moving;
temp_contact=contact;
}
}
else if(ultra!=temp_ultra && edge_evade_status==not_running &&
contact_evade_status==not_running)
{
if(ultra!=0)
{
if(tracking_status==running)
{
kill_process(tracking_pid);
tracking_status=not_running;
}
if(move_status==running)
{
kill_process(move_pid);
move_status=not_running;
}
if(robot_status==moving)
{
ao();
robot_status=not_moving;
}
temp_ultra=ultra;
tracking_pid=start_process(tracking());
}
else
{
if(tracking_status==running)
kill_process(tracking_pid);
if(move_status==running)
kill_process(move_pid);
ao();
robot_status=not_moving;
temp_ultra=ultra;
}
}
}
}
Next section
Back to Dave's SUMO robot project page
Back to Dave's home page
Dave Chu Concordia University Electrical and Computer Engineering 1455 De Maisonneuve O. H941 Montreal, Quebec, Canada H3G 1M8 Telephone: (514) 848-3115 Fax: (514) 848-2802 Email: dave@ece.de-spam.concordia.ca