Research Axes
Integrated Multidisciplinary Design Optimization for Safety-Critical UAVs and VTOL Aircraft
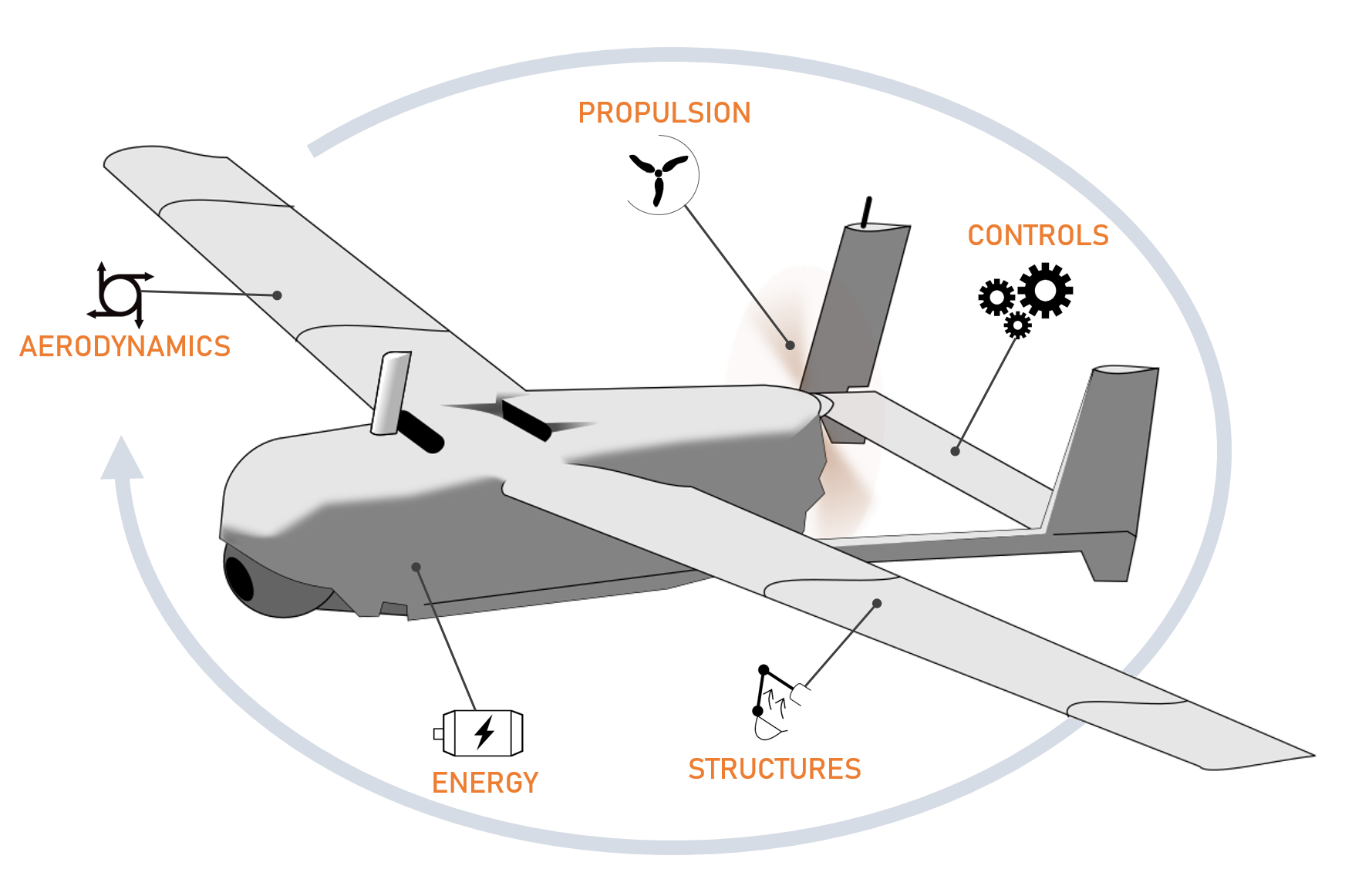
The objective is to develop a comprehensive, multidisciplinary design optimization methodology for both drones and vertical takeoff and landing (VTOL) aircraft, including fixed-wing and VTOL unmanned aerial vehicles (UAVs). This methodology aims to achieve high levels of safety and reliability by seamlessly integrating innovative design techniques, controllability assessments, reliability analyses, and regulatory guidelines. The integration of these elements will serve to advance the state-of-the-art in safety-critical drone and VTOL aircraft design.
Optimizing flight control of unmanned aerial vehicles with physics-based reliability models
The project aims to improve the reliability of unmanned aerial vehicles by using a novel control allocation system based on physics-based reliability models

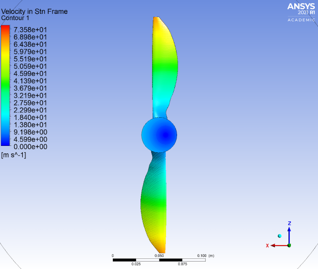
A multidisciplinary conceptual design methodology integrating CFD simulation for optimal and innovative drone designs
The project aims to combine UAV multidisciplinary design optimization at the vehicle level with CFD optimization of critical aerodynamic components to explore innovative custom designs.
Publication Acknowledgement
If research supported by this laboratory results in publication, please acknowledge this support by including the following in your publication(s):
"We thank Dr. Jonathan Liscouët/Concordia University in Montréal, QC, for the use of the High Realiability Aerospace Design Lab, which provided _____ service."