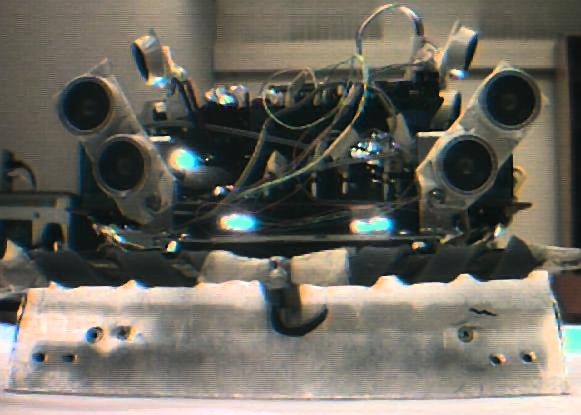
Morbid Curiosity 2nd place finisher of 96 RoboWar competition
Click here for full size image (87k)
The goal of the project is to design, build and implement an autonomous robot for the yearly RoboWar competition. The object of RoboWar is to have your robot push your opponent's robot off a 1.8m diameter circular platform painted black with a 6mm white edge. The maximum weight of the robot is 3kg and can not have a foot print of more than 22cmX22cm.
There are two class of robots, remote controlled and autonomous. Remote controlled are operated by a human participant via RF link. Autonomous on the other hand has to be self contained with no human influence in its operations with the exception to its programming.
Obviously, the are many challenges that an autonomous robot must overcome. For example an autonomous robot must be able to; find its opponent, know when to push, and be smart enought to navigate the platform without going off by itself.
This report will document the design, construction, development and implementation of an autonomous robot using off-the-shelve items to simplify design and minimize cost. In the following pages, especially in the "Mechanicals" section, both Metric and SAE unit are used. This is due to the nature of the off-the-shelve items used. Many of the machining of the mechanical parts can be done using hand tools with only a few exceptions. Here is an image of my March 1996 second place winner Morbid Curiosity.
Next section
Back to Dave's SUMO robot project page
Back to Dave's home page
Dave Chu Concordia University Electrical and Computer Engineering 1455 De Maisonneuve O. H851 Montreal, Quebec, Canada H3G 1M8 Telephone: (514) 848-3115 Fax: (514) 848-2802 Email: dave@ece.de-spam.concordia.ca