The controller is a 6.270 board from MIT . It is a 68HC11 based microcontroller with 32K of RAM. C is the programing langauge used to control the robot using Interactive C .
The robot runs on 4 motors taken from cordless screwdrivers. It has speed control and is also reversible. To help the robot to navigate and to seek out its opponent, it uses 4 pairs of ultrasonic transducers for tracking and detection of its opponent. To avoid the robot from going off the playing surface on its own, it has 4 infared transmit/receiver pairs at each corner. The robot also has 4 contact sensors at each of its sides to detect contact with its opponent.
Here is a summary of the specification for the robot Morbid Curiosity:
Motor:
Speed Control:
Sensors:
Battery:
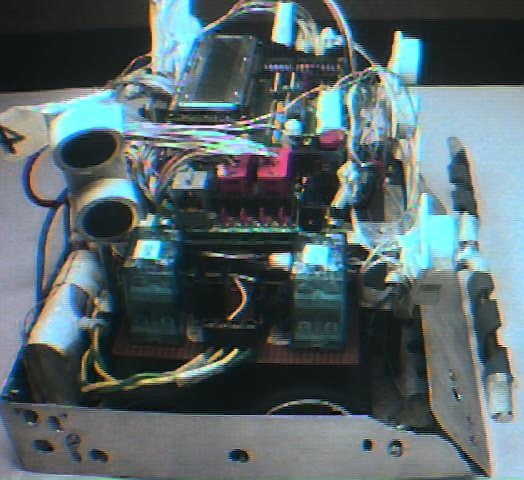
Here is a couple of pictures of Morbid Curiosity. You can also have a look at my current SUMO robot project. If you have any comments, suggestions, ideas or corrections please feel free to drop me a line at: dave@ece.de-spam.concordia.ca .
Back to Dave's home page
Dave Chu Concordia University Electrical and Computer Engineering 1455 De Maisonneuve O. H941 Montreal, Quebec, Canada H3G 1M8 Telephone: (514) 848-3115 Fax: (514) 848-2802 Email: dave@ece.de-spam.concordia.ca