|
|
Research
All of these research interests fit into my three primary focus areas within the theory and practice
of automatic control systems: (1) the development and validation of mathematical models of complex dynamic systems; (2) the analysis of the stability and performance properties
of these systems and (3) the synthesis and the validation of automatic controllers that can improve stability and performance of these systems.
My main research interest, besides increasing knowledge and understanding, is the development of technology leading to novel automatic controllers that can be used in industry to enhance performance
of engineering systems while saving energy and being sustainable. To synthesize such novel controllers, it is essential to understand the physical principles behind the particular engineering system to be controlled to be able to develop
an accurate mathematical model that can then be used for controller design. Knowledge of optimization techniques is important so that energy can be minimized for such systems making them more sustainable.
 Control Theory: Computer-aided Design and Analysis of Switched Controllers
Control Theory: Computer-aided Design and Analysis of Switched Controllers
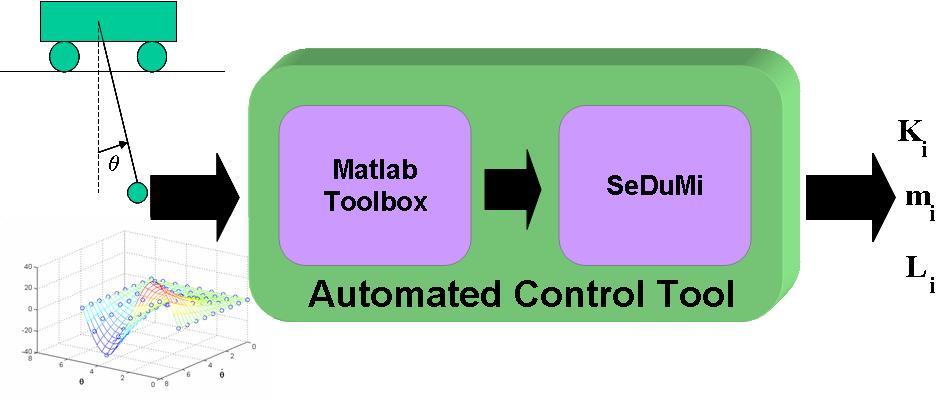
My research group is working on novel switching controller design methods that can be cast as optimization problems that can then be solved numerically.
The focus is on a particular class of switched controllers with a special switching structure, called piecewise-affine controllers. The final objective is the development of modeling and synthesis
algorithms that can be easily programmed into available computer-aided design software such as, for example, Matlab/Simulink (a trademark of The Mathworks Inc.) or Maple (a trademark of Maplesoft) and then interfaced with
a real-time operating system for implementation in engineering systems. The advantages of considering switched controllers in engineering applications is twofold:
(1) switched controllers add flexibility and can therefore increase performance as compared to fixed controllers,
(2) certain systems have a physical structure that prevents them from being stabilized by a fixed controller that is smooth and time-invariant.
An example of situation (1) is the fact that most engineering systems have trade-offs, for example between transient time performance and steady state performance, and are therefore more naturally
controlled by a switched controller with different properties in transient and steady state than by a fixed controller. For example, engine valves have stringent performance requirements of very fast
transient response and small contact velocity. An example of situation (2) is the control of mechanical systems with nonholonomic constraints such as, for example, automatic parking of an automobile.
Another important area of research in my group is the development of a systematic methodology for extension of local linear controllers to global or semi-global piecewise-affine controllers that can provide
the same performance of the linear controller close to a desired operating point, but that are however guaranteed to stabilize the system even when operating far from the desired point.
This methodology holds a strong potential to be implemented in engineering applications in industry that currently use only local linear controllers that cannot guarantee stability under large
perturbations.
top of page
 Concordia's Flight Simulator (Courtesy of Mechtronix Inc.)
Concordia's Flight Simulator (Courtesy of Mechtronix Inc.)
Aerospace Applications
My research group has been working on synthesis of optimal flight management systems, energy-efficient autopilots with applications to commercial jets and Uninhabited Air Vehicles (UAVs).
One of the main difficulties in controlling these vehicles is the fact that their dynamics are highly nonlinear and, as one scales down to the micro scale (considered to be around 15 cm wingspan or even less),
aerodynamics at small Reynolds numbers must be considered instead of the more conventional large Reynolds number condition.
On top of this, the communication between vehicles in formation and the associated delays and possible packet dropouts of the wireless network add complexity to the task of controller design.
The computer-aided design methodology we are developing, approximates the nonlinear terms by piecewise-affine terms and then designs a
piecewise-affine controller for this approximate model that is guaranteed to stabilize the original system for small enough modeling errors.
The research of our group has focused so far on the following aerospace applications:
(1) navigation and control of quadrotor UAVs (collaboration with Wowwee and past collaboration with Pleiades),
(2) flight management systems (FMS, in collaboration with TRU Simulation + Training, former Mechtronix)
(3) modeling, simulation and piecewise-affine controller design for a UAV (built by Capstone students co-supervised by me and Dr. Dolatabadi at Concordia University),
(4) modeling and piecewise-affine control of an aerobatic helicopter (past collaboration with Dr. Gordon),
(5) satellite integrated sensor fusion and piecewise-affine control (past collaboration with the Canadian Space Agency),
(6) control of flutter (past collaboration with Bombardier Aerospace),
(7) jet engine monitoring and prognosis (past collaboration with Pratt and Whitney Canada),
Future work on quadrotor UAVs in collaboration with Wowwee will include vehicle coordination and control.
 Concordia's MAV that won the CSME prize for best student design in 2006
top of page
Concordia's MAV that won the CSME prize for best student design in 2006
top of page
Automotive Applications
Switched controller synthesis has also being investigated in my research group for automotive applications, mostly in active suspension systems, ABS and engine valves.
In suspension systems, magneto-rheological actuators exhibit a characteristic behavior that can be described accurately by a piecewise-affine function.
The dynamic models are thus naturally in the framework of piecewise-affine systems for which the computer-aided design methodology being developed in my group is the appropriate
tool to be used. In ABS systems, the variation of the coefficient of adhesion to the road versus slip coefficient can be accurately approximated by a piecewise-affine characteristic with only three sectors.
The methodology being developed in my research group can then be applied to design controllers that guarantee a working point close to the maximum coefficient of adhesion to the road.
Finally, the unthrottled control of engine valves has the potential to be made possible using voice coil actuators controlled by a Pulse Width Modulation (PWM) controller that switches between two
voltage levels: one for good performance in the transient period and another for good performance in steady state. The analysis and synthesis of such controller falls under the framework of switched
control and the tools developed in our group are also applicable (past collaboration with Dr. Hong).
top of page
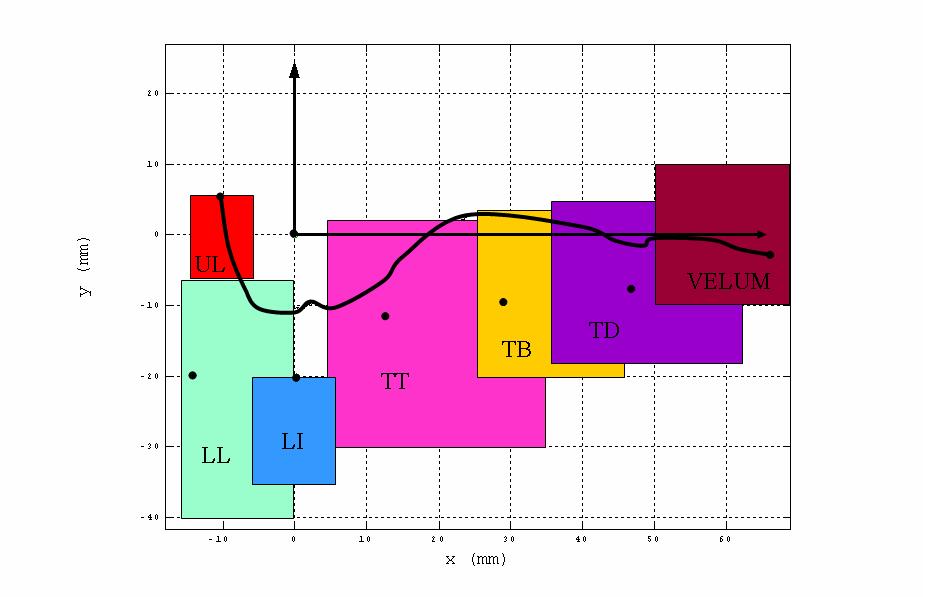
Biological Applications (Vocal Tract)
Speech signals are nonstationary signals. However, for speech frames of very small periods of time (typically on the order of miliseconds), the speech signal can be assumed to
be stationary. For articulatory models (models of the mechanical articulators, such as lips, tong and teeth) of speech frames of this duration, a linear model can be accurate enough.
Therefore, switched linear systems are adequate articulatory speech models for speech frames having minutes to hours of speech. The research in this area, in a past collaboration with Dr. Kroeker
from Eliza Corporation has focused on the modeling of speech production systems and the study of properties such as controllability and state transfer, as well as the energy of speech.
In the future, controller synthesis for speech production and speech recognition will be targeted.
 top of page
top of page
Industrial Engineering Applications (Switched Production Systems and Inventory Control)
The model of inventory in production systems leads naturally to a constrained switched system.
The switching variable is the stock level. When the stock level
is positive, the produced parts are being stored. When the stock level
is negative it leads to backorders, which means that orders for
production of parts are coming in and there are no stocked parts to
immediately meet the demand. These two situations correspond to different models
that are switched based on the sign of the stock level.
A state feedback controller that forces the stock level to be kept close to zero (sometimes
called a just-in-time policy), even when there are fluctuations in the demand,
can be designed using piecewise-linear H-infinity control theory.
The synthesis of the state feedback controller that quadratically
stabilizes the production dynamics and at the same time rejects the
external demand fluctuation (treated as a disturbance) can be cast as a
set of linear matrix inequalities (LMIs) and solved numerically in a efficient way, given that the
resulting optimization problem is convex. Future work will concentrate on the study of interconnected
production systems in supply chains (this work started as a past collaboration with Dr. E.-K. Boukas from Ecole Polytechnique).
top of page
If you are a student with a background on either electrical or mechanical and aerospace engineering,
and you are interested in one of these topics, here is what I am looking for in the background of students:
- Control Theory.
- Modeling of Physical Systems (special emphasis on vehicle dynamics and robotics).
- Mathematics of Dynamical Systems (mainly Differential Equations, Linear Algebra, Real Analysis and Stability Theories, such as Lyapunov Stability).
- Mathematics and Physics (Lagrangian and Hamiltonian Systems) of System Optimization
- Signal Processing.
- Stochastic Dynamical Systems.
- Programming skills (C++,Matlab/Simulink, MEX files, real-time operating systems).
I am the founder of the HYbrid CONtrol Systems (HYCONS) Lab and the leader of the
Flight Simulation and Control Laboratory at Concordia University.
The current HYCONS lab members are the students in my research group:
Flight Management and Control Systems
- Steven Li (PhD student)
- Soroush Asri (MASc student)
- Mahmood Rezaee Abadi (MASc student)
Electric Energy Generation from Waste Heat
- Camilo Orrego Caicedo (MASc student)
 From left to right: Behzad Samadi, KyungJae Baik, Scott Casselman, Luis Rodrigues, Shaun DiSalvo, Xiaoxi Huang, Giancarlo Luglio
From left to right: Behzad Samadi, KyungJae Baik, Scott Casselman, Luis Rodrigues, Shaun DiSalvo, Xiaoxi Huang, Giancarlo Luglio
Past Collaborations with Postdoctoral and Visiting Fellows:
- Ely Carneiro Paiva (Professor at Unicamp)
- Mailis Gomes Rodrigues (Senior UX Researcher at Desjardins)
- Amir Hajiloo (Robotics Motion Planning Engineer at Miso Robotics)
- Ronilson Rocha (Professor at Universidade Federal de Ouro Preto)
- Behzad Samadi (Director of Innovation and Engagement at Advanced Intelligent Systems Inc.)
- Henrique Paiva (Systems Engineer at Mectron EIC)
- Mohsen Zamani Fekri (Functional Architect at Alstom)
- Jamila Raouf (currently working on a family company)
The following students have worked in my lab and have already graduated:
Graduate Degrees:
- Steven Li, (MASc student), graduated 2021, currently a PhD student in my research group
- Julia Zamboni, (PhD student, graduated 2020, currently a postdoctoral fellow at the University of Louvain)
- Mitchell Lichocki, (MASc student, graduated 2020, currently a Technical Professional in Unmanned Logistics at Bell Textron)
- Weihong Yuan, (MASc student, graduated 2020, currently a researcher at the Shenyang Institute of Automation)
- Bruno Carvalho (MASc student, graduated 2018, currently a Software Developer at VIA)
- Emily Oelberg (MASc student, graduated 2018)
- Alexander Botros (MASc student, graduated 2017, currently a Postdoctoral Research Fellow at University of Waterloo)
- Maxim Kaptsov (MASc student, graduated 2017, currently a Control Systems Specialist at NovaBus)
- Michael Di Perna (MASc student, graduated 2017, currently a Process Automation Software Manager at Lumentum)
- Michael El-Jiz (MASc student, graduated 2015, currently a Software Engineer at Microsoft)
- Jesus Villarroel (MASc student, graduated in 2015, currently a Software Development Engineer at Microsoft)
- Miad Moarref (PhD student, graduated in 2013, currently a Senior Software Developer at LeddarTech)
- Azita Malek (MASc student, co-supervised with Dr. Khorasani, graduated in 2013, currently a Director of R&D Programs at Cowan Dynamics Inc.)
- Amin Zavieh (MASc in ECE, co-supervised with Dr. Khorasani, graduated in 2013, currently CEO at Definitechs Inc.)
- Sina Kaynama (MASc in ECE, graduated in 2012, currently working in Iran)
- Camilo Ossa (MASc in ECE, graduated in 2012, currently a Systems Software Developer at CAE)
- Patrick Demers-Stoddard (MEng student in Aerospace, currently Manager at Bell Flight)
- Mehdi Abedinpour Fallah (MASc in MIE, graduated in 2011, currently an R&D Principal Specialist at Pratt & Whitney Canada)
- Behnam Gholitabar (MASc in MIE, co-supervised with Dr. Rabbath, graduated in 2010, currently in Project Planning and Control Engineering Management at Bombardier)
- Nastaran Nayebpanah (MASc in MIE, co-supervised with Dr. Zhang, graduated in 2010, Manager of Software Engineering at Pratt & Whitney)
- Andrew Morrison (MASc in MIE, co-supervised with Dr. Wuthrich, graduated in 2010, currently a Research Fellow at University College London)
- Scott Casselman (MASc in MIE, graduated in 2009, currently a Subject Matter Expert on Hardware Autopilot at CAE)
- KyungJae Baik (MEng in Aerospace, graduated in 2009, currently an Avionics Engineer at the Department of National Defence)
- Shaun Di Salvo (MEng in Aerospace, graduated in 2008, currently a Flight Test Coordinator at Airbus)
- Behzad Samadi (PhD in MIE, graduated in April 2008, currently Director of Innovation and Engagement at Advanced Intelligent Systems Inc.)
- Stefan LeBel (MASc in MIE, graduated in August 2007, currenlty MSS Engineering Support Lead at MDA)
- Bruce Alstrom (MEng in Aerospace, graduated in 2007, currently part time faculty at Concordia University)
- Samer Shehab (MASc in MIE, graduated in April 2006, currently Manager at SKS Services Inc.)
- Forhad Khandaker (MASc in MIE, co-supervised with Dr. Hong, graduated in April 2006, currently Engineering Project Team
Leader at Catterpillar)
- Mouhamed Abdulla (MEng in Aerospace, graduated in 2005, currently a Professor of Electrical Engineering at Sheridan College)
- Yue Wei (MASc in MIE, co-supervised with Dr. Gordon, graduated in September 2005, currently system analyst at Human Resources and Skills Development Canada)
Undergraduate Degrees:
- Matheus Oliveira da Silva (Exchange student in 2014 from the Federal University of Rio Grande do Norte)
- Arthur Macedo (Exchange student in 2013 from the University of Brasilia, Brasil, currently an Electrical Engineer at the Brazilian Air Force)
- Gavin Kenneally (BSc in Mechanical Engineering, graduated in 2012, currently CEO of Ghost Robotics)
- Felipe Gomez (Exchange student from Universidad de Antioquia, Colombia, to be graduated in 2011)
- Felipe Jaramillo (Exchange student from Universidad de Antioquia, Colombia, graduated in 2010, currently CTO at Melonn)
- Alejandro Celis (BSc in Mechanical Engineering, graduated in 2009, currently CPO at Melonn)
- Ralph Koyess (BSc in Mechanical Engineering, graduated in 2009, currently Senior Defence & Intelligence CSM at Planet)
- Ralf Endress (Exchange student from Technical University Munich, Germany, graduated in 2007, currently Avionics Team Lead at Kopter Group AG)
- Alessandra Pollifroni (Capstone co-supervised with Dr. Dolatabadi, graduated in 2006, now Engineer at Wood Group)
- Davide Prella (Capstone co-supervised with Dr. Dolatabadi, graduated in 2006, currently Air System Lead at Diamond D-Jet Aircraft)
- Jason Smalridge (Co-op supervised by me, graduated in 2006, currently Senior Quality Assurance Tester at Unity Technologies)
- Amelie Lemoine (Capstone Project, graduated in 2004, currently Flight Control System Specialist at Bell Flight)
|
