
We developed a new optimization-simulation approach in 1998, named robust inexact linear programming (RILP), to conduct coupled air quality modeling and regional pollution control planning, and to deal with inherent variability and complexity among various geographic areas, air pollutants, emission sources, and control technologies. The robust optimization (RO) approach with fuzzy coefficients and fuzzy capacities was introduced to tackle the system risk by logically extending the decision space. The inexact linear programming (ILP) allows uncertainties in the model inputs to be communicated into the optimization process, and thereby solutions reflecting the inherent uncertainties can be derived. Results from a case study indicated that the proposed model was a useful decision tool for finding robust solutions to more effective environmental pollution control planning.
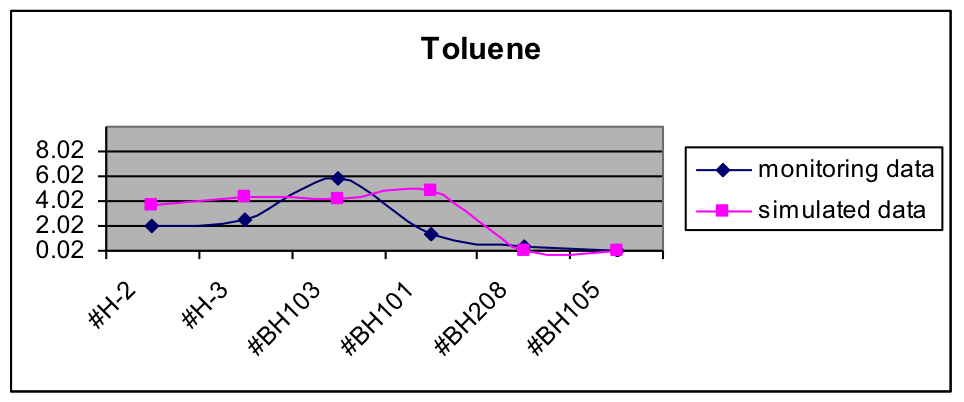
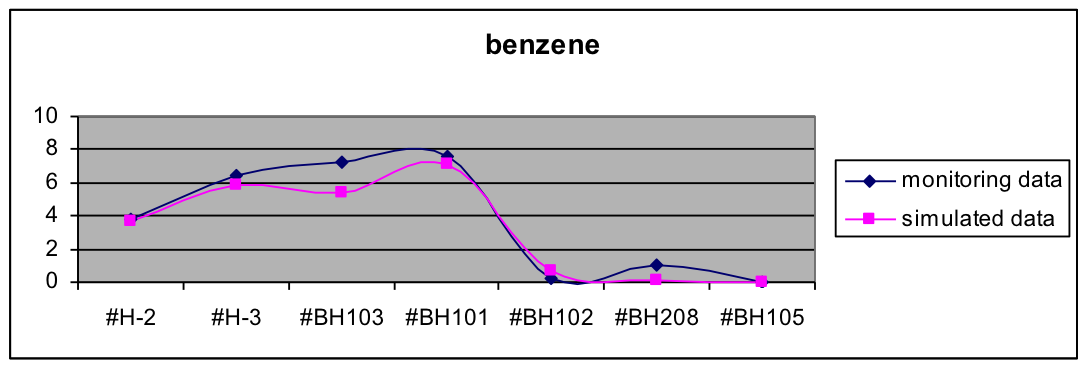
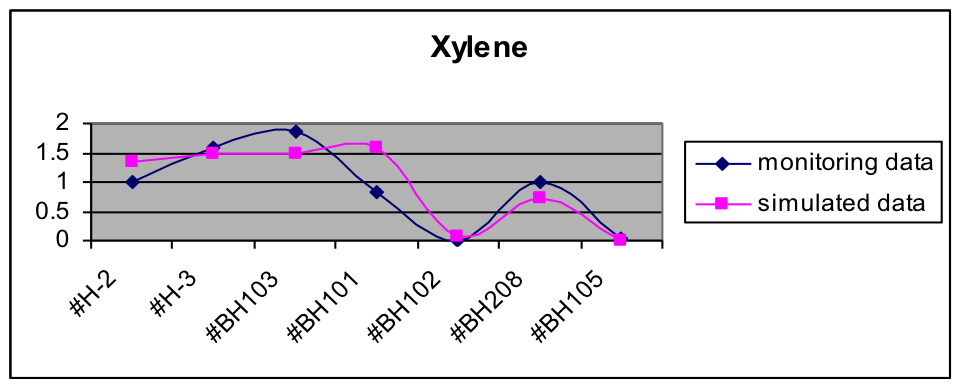
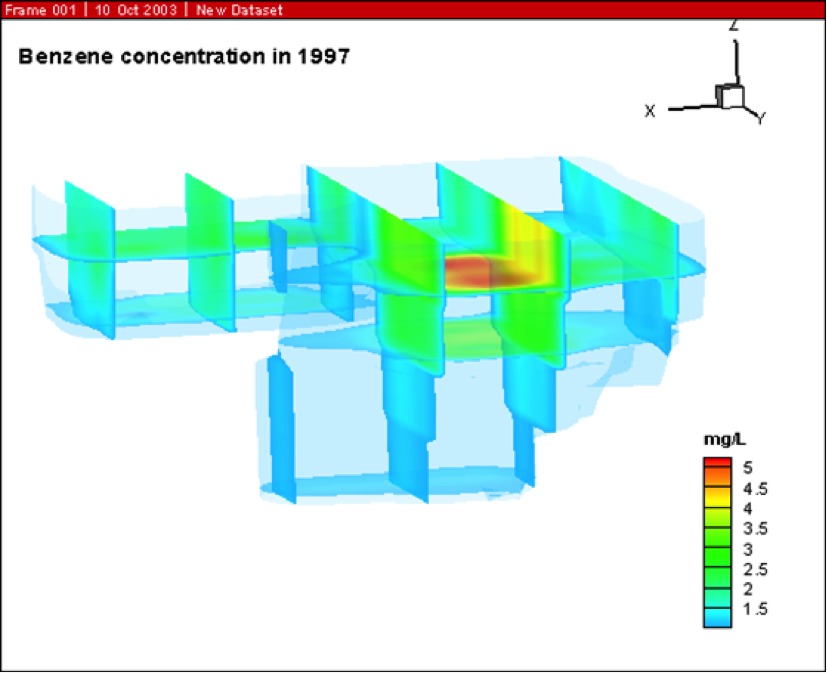
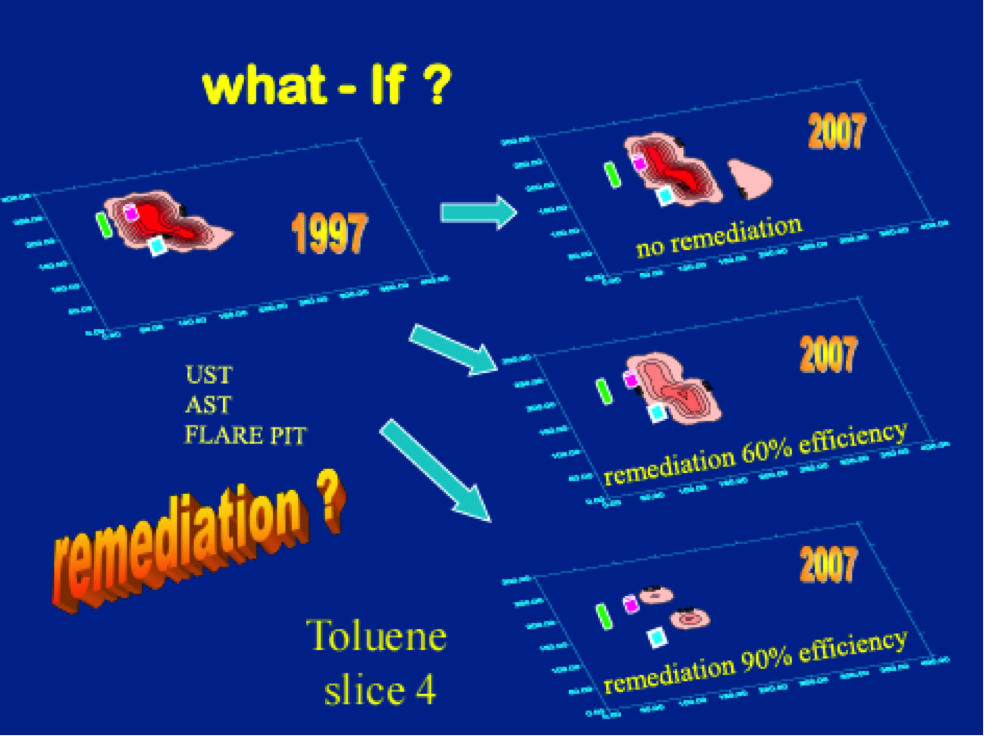
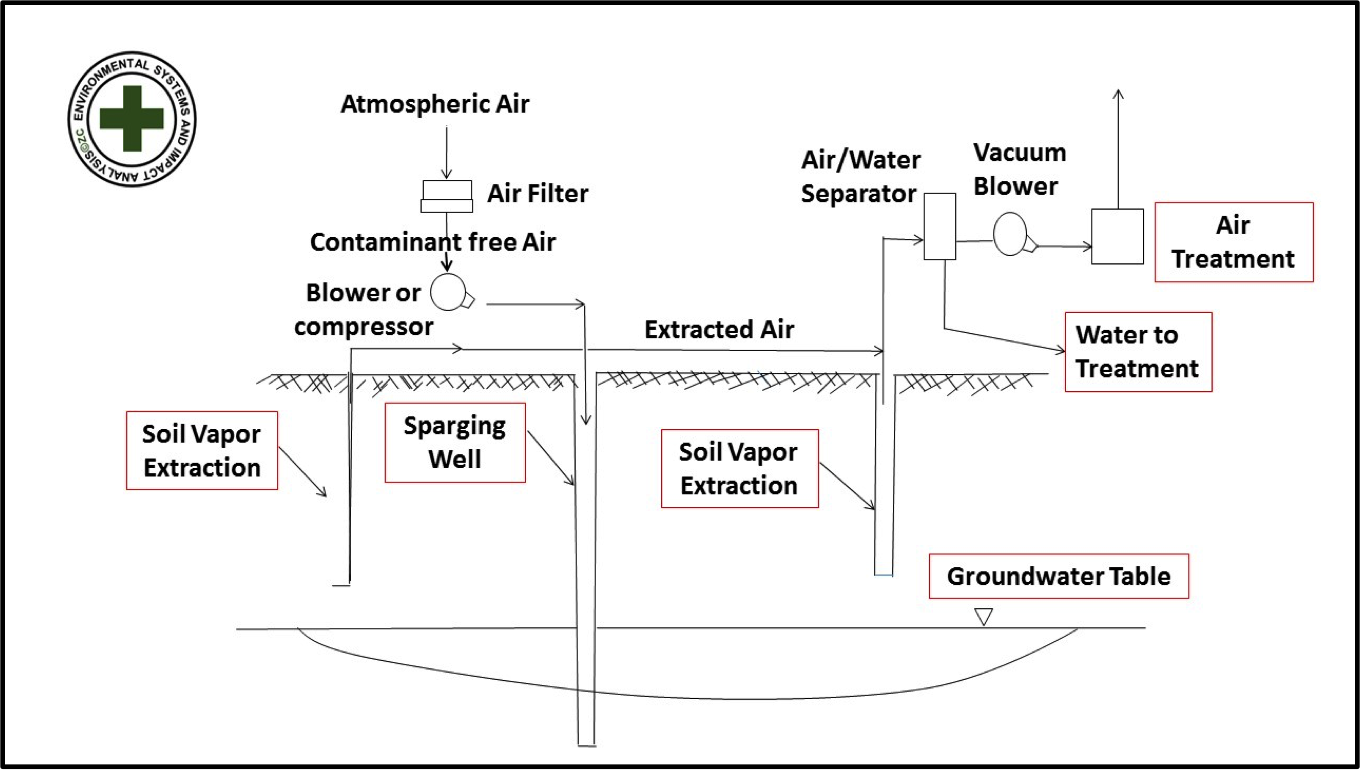
We were the pioneers to develop multiphase flow and multi-component transport model from 90s in Canada for examining porous soil and groundwater site, and apply to design cost-effective soil and groundwater remediation system. The model gives the distribution of multiple contaminants and their evolution in the soil and groundwater. The following figures show the model results compared with the field monitoring data.
We developed an integrated three-dimensional (3D) approach for the simulation of produced water discharges in offshore areas. Specifically, an explicit second-order finite difference method was used to model the far-field pollutant dispersion behavior, and this method was coupled with the jet-plume model JETLAG with an extension of the 3D cross flow conditions to simulate the near-field mixing processes. A dynamic coupling technique with full consideration of the interaction between the discharged fluids and receiving waters was employed in the model. A case study was conducted on the Grand Banks of Newfoundland, Canada. The field validation of the modeling results was conducted for both the near-field and far-field dispersion processes, and the modeling results were in good agreement with the field observations. This study provides an integrated system tool for the simulation of complex transport processes in offshore areas, and the results from such modeling systems can be further used for the risk assessment analysis of the surface water environment.



We developed the state of the art CFD model to design and examine the municipal water and waste water treatment system. The developed modeling techniques have been successfully applied to the combined sewer system and the Kennedale end-of-pipe constructed wetland in the City of Edmonton.
Critical environmental and human health concerns are associated with rapidly growing nanotechnology and manufactured nanomaterials (MNMs). The main risk arises from occupational exposure via chronic inhalation of nanoparticles. This research presents a chance-constrained nonlinear programming (CCNLP) optimization approach, which is developed to maximize the nanaomaterial production and minimize the risks of workplace exposure to MNMs. The CCNLP method integrates nonlinear programming (NLP) and chance-constrained programming (CCP), and handles uncertainties associated with both the nanomaterial production and workplace exposure control. The CCNLP method was examined through a single-walled carbon nanotube (SWNT) manufacturing process. The study results provide optimal production strategies and alternatives. It reveal that a high control measure guarantees that environmental health and safety (EHS) standards regulations are met, while a lower control level leads to increased risk of violating EHS regulations. The CCNLP optimization approach is a decision support tool for the optimization of the increasing MNMS manufacturing with workplace safety constraints under uncertainties.