DNSS: Dual-Normal Space Sampling for 3D ICP Registration
Tsz-Ho Kwok
IEEE Transactions on Automation Science and Engineering, accepted.
[doi:10.1109/TASE.2018.2802725]
Abstract:
Rigid registration is a fundamental process in many applications that require alignment of different datasets. Iterative Closest Point (ICP) is a widely used algorithm that iteratively finds point correspondences and updates the rigid transformation. One of the key variants of ICP to its success is the selection of points, which is directly related to the convergence and robustness of the ICP algorithm. Besides uniform sampling, there are a number of normal-based and feature-based approaches that consider normal, curvature, and/or other signals in the point selection. Among them, Normal Space Sampling (NSS) is one of the most popular techniques due to its simplicity and low computational cost. The rationale of NSS is to sample enough constraints to determine all the components of transformation, but this study finds that NSS actually can constrain the translational normal space only. This paper extends the fundamental idea of NSS and proposes Dual-Normal Space Sampling (DNSS) to sample points in both translational and rotational normal spaces. Compared with NSS, this approach has similar simplicity and efficiency without any need of additional information, but has a much better effectiveness. Experimental results show that DNSS can outperform the normal-based and feature-based methods in terms of convergence and robustness. For example, DNSS can achieve convergence from an orthogonal initial position while no other methods can achieve.
In-situ Droplet Inspection and Closed-Loop Control System using Machine Learning for Liquid Metal Jet Printing
Tianjiao Wang, Tsz-Ho Kwok, Chi Zhou, and Scott Vader
Journal of Manufacturing Systems, accepted.
Abstract:
Liquid Metal Jet Printing (LMJP) is a revolutionary 3D printing technique in fast but low-cost additive manufacturing. The driving force is produced by magneto-hydrodynamic property of liquid metal in an alternating magnetic field. Due to its integrated melting and ink-jetting process, it can achieve 10x faster at 1/10th of the cost as compared to current metal 3D printing techniques. However, the jetting process are influenced by many uncertain factors, which imposes a significant challenge to its process stability and product quality. To address this challenge, we present a closed-loop control mechanism using vision technique integrated with neural network to inspect droplet behaviours. This system automatically tunes the drive voltage applied to compensate the uncertain influence based on vision inspection result. To realize this, we first extract multiple features and properties from images to capture the droplet behaviour. Second, we use a neural network together with PID control process to determine how the drive voltage should be adjusted. We test this system on a piezoelectric-based ink-jetting emulator, which has very similar jetting mechanism to the LMJP. Results show that significantly more stable jetting behaviour can be obtained in real-time. This system can also be applied to other droplet related applications owing to its universally applicable characteristics.
Geometry-based Direct Simulation for Multi-Material Soft Robots
Guoxin Fang, Christopher-Denny Matte, Tsz-Ho Kwok, and Charlie C.L. Wang
IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, May 21-25, 2018.
Abstract:
Robots fabricated by soft materials can provide higher flexibility and thus better safety while interacting with natural objects with low stiffness such as food and human beings. However, as many more degrees of freedom are introduced, the motion simulation of a soft robot becomes cumbersome, especially when large deformations are presented. Moreover, when the actuation is defined by geometry variation, it is not easy to obtain the exact loads and material properties to be used in the conventional methods of deformation simulation. In this paper, we present a direct approach to take the geometric actuation as input and compute the deformed shape of soft robots by numerical optimization using a geometry-based algorithm. By a simple calibration, the properties of multiple materials can be modeled geometrically in the framework. Numerical and experimental tests have been conducted to demonstrate the performance of our approach on both cable-driven and pneumatic actuators in soft robotics.
V4PCS: Volumetric 4PCS Algorithm for Global Registration
Jida Huang, Tsz-Ho Kwok, and Chi Zhou
ASME Transactions - Journal of Mechanical Design, 139(11), 111403 (Oct 02, 2017).
[doi:10.1115/1.4037477]
Abstract:
With the advances in three-dimensional (3D) scanning and sensing technologies, massive human-related data are now available and create many applications in data-driven design. Similarity identification is one of basic problems in data-driven design and can facilitate many engineering applications and product paradigm such as quality control and mass customization. Therefore, reusing information can create unprecedented opportunities in advancing the theory, method, and practice of product design. To enable information reuse, different models have to be aligned so that their similarity can be identified. This alignment is commonly known as the global registration that finds an optimal rigid transformation to align two 3D shapes (scene and model) without any assumptions on their initial positions. The Super 4-Points Congruent Sets (S4PCS) is a popular algorithm used for this shape registration. While S4PCS performs the registration using a set of 4 coplanar points, we find that incorporating the volumetric information of the models can improve the robustness and the efficiency of the algorithm, which are particularly important for mass customization. In this paper, we propose a novel algorithm, Volumetric 4PCS (V4PCS), to extend the 4 coplanar points to non-coplanar ones for global registration, and theoretically demonstrate the computational complexity is significantly reduced. Experimental tests are conducted on a number of models such as tooth aligner and hearing aid to compare with S4PCS. The experimental results show that the proposed V4PCS can achieve a maximum of 20 times speedup and can successfully compute the valid transformation with very limited number of sample points. An application of the proposed method in mass customization is also investigated.
4D Printing: Design and Fabrication of Smooth Curved Surface Using Controlled Self-Folding
Dongping Deng, Tsz-Ho Kwok, and Yong Chen
ASME Transactions - Journal of Mechanical Design, 139(8), 081702 (Jun 22, 2017).
[doi:10.1115/1.4036996]
Abstract:
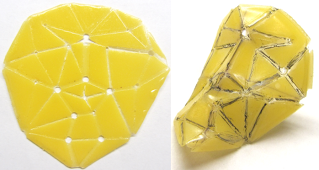
Traditional origami structures fold along pre-defined hinges, and the neighboring facets of the hinges are folded to transform planar surfaces into three-dimensional (3D) shapes. In this study, we present a new self-folding design and fabrication approach that has no folding hinges and can build 3D structures with smooth curved surfaces. This four-dimensional (4D) printing method uses a thermal-response control mechanism, where a thermo shrink film is used as the active material and a photocurable material is used as the constraint material for the film. When the structure is heated, the two sides of the film will shrink differently due to the distribution of the constraint material on the film. Consequently, the structure will deform over time to a 3D surface that has no folding hinges. By properly designing the coated constraint patterns, the film can be self-folded into different shapes. The relationship between the constraint patterns and their correspondingly self-folded surfaces has been studied in the paper. Our 4D printing method presents a simple approach to quickly fabricate a 3D shell structure with smooth curved surfaces by fabricating a structure with accordingly designed material distribution.
Isogeometric Computation Reuse Method for Complex Objects with Topology-Consistent Volumetric Parameterization
Gang Xu, Tsz-Ho Kwok, and Charlie C.L. Wang
Computer-Aided Design, Volume 91, October 2017, Pages 1-13.
[doi:10.1016/j.cad.2017.04.002]
Abstract:
Volumetric spline parameterization and computational efficiency are two main challenges in isogeometric analysis (IGA). To tackle this problem, we propose a framework of computation reuse in IGA on a set of three-dimensional models with similar semantic features. Given a template domain, B-spline based consistent volumetric parameterization is first constructed for a set of models with similar semantic features. An efficient quadrature-free method is investigated in our framework to compute the entries of stiffness matrix by Bezier extraction and polynomial approximation. In our approach, evaluation on the stiffness matrix and imposition of the boundary conditions can be pre-computed and reused during IGA on a set of CAD models. Examples with complex geometry are presented to show the effectiveness of our methods, and efficiency similar to the computation in linear finite element analysis can be achieved for IGA taken on a set of models.
GDFE: Geometry-Driven Finite Element for Four-Dimensional Printing
Tsz-Ho Kwok and Yong Chen
ASME Journal of Manufacturing Science and Engineering, 139(11), 111006 (Sep 13, 2017).
[doi:10.1115/1.4037429]
Abstract:
Four-dimensional (4D) printing is a new category of printing that expands the fabrication process to include time as the forth dimension, and its process planning and simulation have to take time into consideration as well. The common tool to estimating the behavior of a deformable object is the finite element method (FEM). Although FEM is powerful, there are various sources of deformation from hardware, environment, and process, just to name a few, which are too complex to model by FEM. This paper introduces Geometry-Driven Finite Element (GDFE) as a solution to this problem. Based on the study on geometry changes, the deformation principles can be drawn to predict the relationship between the 4D-printing process and the shape transformation. Similar to FEM, the design domain is subdivided into a set of GDFEs, and the principles are applied on each GDFE, which are then assembled to a larger system that describes the overall shape. The proposed method converts the complex sources of deformation to a geometric optimization problem, which is intuitive and effective. The usages and applications of the GDFE framework have also been presented in this paper, including freeform design, reserve design, and design validation.
An Interactive Product Customization Framework for Freeform Shapes
Yunbo Zheng, and Tsz-Ho Kwok
Rapid Prototyping Journal, Vol. 23 Issue: 6, pp. 1136-1145, 2017.
[doi:10.1108/RPJ-08-2016-0129]
Abstract:
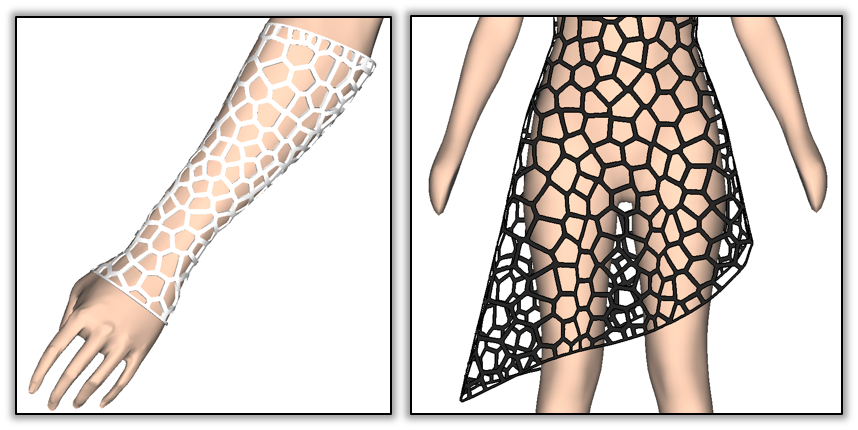
Additive Manufacturing (AM) enables the fabrication of three-dimensional (3D) objects with complex shapes without additional tools and refixturing. However, it is difficult for user to use traditional computer-aided design tools to design custom products. In this paper, we presented a design system to help user design custom 3D printable products on top of some freeform shapes. Users can define and edit styling curves on the reference model using our interactive geometric operations for styling curves. Incorporating with the reference models, these curves can be converted into 3D printable models through our fabrication interface. We tested our system with four design applications including a hollow-patterned bicycle helmet, a T-rex with skin frame structures, a face mask with Voronoi patterns, and an AM-specific night dress with hollow patterns. The executable prototype of the presented design framework used in the customization process is publicly available.
A Structural Topology Design Method Based on Principal Stress Line
Tsz-Ho Kwok, Yongqiang Li, and Yong Chen
Computer-Aided Design, Volume 80, November 2016, Pages 19-31.
[doi:10.1016/j.cad.2016.07.005]
Abstract:
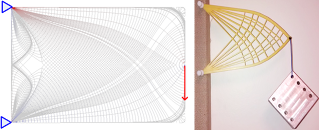
Topology optimization is an important topic in structural mechanics. One common application is to obtain the optimal distribution of material that maximizes the stiffness of the solution (minimize the compliance). However, as an iterative process, topology optimization of large and complex structures is computationally intensive. The problem becomes even more complicated if the manufacturing constraints are taken into account in the optimization process. In this paper, a novel growth method based on Principal Stress Lines (PSLs) is presented for topology optimization. The PSLs are traced in the design domain along the direction of principal stresses, in which the materials would be located to define the geometry and topology of the structure. Consequently, the optimization problem is converted into a geometric design problem. Compared to previous methods, the computation based on PSLs is fast, and the designer can have explicit control over the number of structural members. In addition, the manufacturing constraints can easily be incorporated. Multiple test cases are given to illustrate the presented method. The PSL-based method is promising for building practical designing tools for various structural applications.
Mass Customization: Reuse of Digital Slicing for Additive Manufacturing
Tsz-Ho Kwok, Hang Ye, Yong Chen, Chi Zhou, and Wenyao Xu
ASME International Design Engineering Technical Conference and the Computer and Information in Engineering Conference (IDETC/CIE), August 21-24, 2016, Charlotte, North Carolina.
ASME Transactions - Journal of Computing and Information Science in Engineering, accepted.
[doi:10.1115/1.4034010]
Abstract:
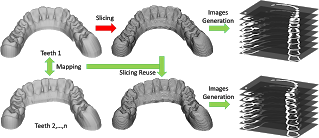
Additive manufacturing, also known as 3D printing, enables production of complex customized shapes without requiring specialized tooling and fixture, and mass customization can then be realized with larger adoption. The slicing procedure is one of the fundamental tasks for 3D printing, and the slicing resolution has to be very high for fine fabrication, especially in the recent developed Continuous Liquid Interface Production (CLIP) process. The slicing procedure is then becoming the bottleneck in the pre-fabrication process, which could take hours for one model. This becomes even more significant in mass customization, where hundreds or thousands of models have to be fabricated. We observe that the customized products are generally in a same homogeneous class of shape with just a little variation. Our study finds that the slicing information of one model can be reused for other models in the same homogeneous group under a properly defined parameterization. Experimental results show that the reuse of slicing information have a maximum of 50 times speedup, and its utilization is dropped from more than 90% to less than 50% in the pre-fabrication process.
A Reverse Compensation Framework for Shape Deformation in Additive Manufacturing

Kai Xu, Tsz-Ho Kwok, and Yong Chen
ASME 2016 International Manufacturing Science and Engineering Conference (MSEC 2016), June 27-July 1, Blacksburg, Virginia.
ASME Transactions - Journal of Computing and Information Science in Engineering, accepted.
[doi:10.1115/1.4034874]
Abstract:
Shape deformation is one of the important issues in additive manufacturing such as the projection Stereolithography process. Volumetric shrinkage combined with thermal cooling during the photopolymerization and other factors such as support-constrained layer building process, leads to complex part deformation that is hard to predict and control. In this paper, a general computation framework based on a reverse compensation approach is presented to reduce the shape deformation of fabricated parts. During the reverse compensation process, the shape deformation is first calculated by physical measurements. A novel method is presented with added markers for identifying the optimal correspondence between the deformed shape and the given nominal CAD model. Accordingly, a new CAD model based on the determined compensation can be constructed. The intelligently modified CAD model, when used in fabrication, can significantly reduce the part deformation when compared to the nominal CAD model. Two test cases have been designed to demonstrate the effectiveness of the presented computation framework. Future work is also discussed in the paper.
Rope Caging and Grasping

Tsz-Ho Kwok, Weiwei Wan, Jia Pan, Jianjun Yuan, Kensuke Harada, Charlie C.L. Wang, and Yong Chen
The International Conference on Robotics and Automation (ICRA), May 16-21, 2016, Stockholm, Sweden.
[doi:10.1109/ICRA.2016.7487345]
Abstract:
We present a novel method for caging grasps in this paper by stretching ropes on the surface of a 3D object. Both topology and shape of a model to be grasped has been considered in our approach. Our algorithm can guarantee generating local minimal rings on every topological branches of a given model with the help of a Reeb graph. Cages and grasps can then be computed from these rings, and physical experimental tests have been conducted to verify the robustness of our approach.
Geometric Analysis and Computation Using Layered Depth-Normal Images for Three-Dimensional Microfabrication

Tsz-Ho Kwok, Yong Chen, and Charlie C.L. Wang
Three-Dimensional Microfabrication Using Two-photon Polymerization, In Micro and Nano Technologies, William Andrew Publishing, 2016, Chapter 5, Pages 119-147.
[doi:10.1016/B978-0-323-35321-2.00007-8]
Abstract:
Additive manufacturing (AM) is a direct manufacturing process that provides the ability to fabricate parts with complex shape. Robust geometric computation is essential to deal with the complex geometry. Current geometric computation methods based on the boundary representation (B-rep) explicitly define and compute geometry. However, such approaches lack in simplicity and are prone to robustness problems. In this chapter, a point-based geometric computation method based on the Layered Depth-Normal Image (LDNI) is presented. A set of computation algorithms are developed for this new point-based method, including the conversions between the LDNI and B-rep models, the offsetting and the Boolean geometric operations, etc. A number of test cases has shown the robustness of the developed geometric operations, and a set of Computer-Aided Design and Manufacturing (CAD/CAM) applications related to the complex component design and manufacturing has also been explored.
Styling Evolution for Tight-Fitting Garments

Tsz-Ho Kwok, Yanqiu Zhang, Charlie C.L. Wang, Yong-Jin Liu, and Kai Tang
IEEE Transactions on Visualization and Computer Graphics, accepted.
[PDF]
[doi:10.1109/TVCG.2015.2446472]
[video]
Abstract:
A self-folding structure fabricated by additive manufacturing can be automatically folded into a demanding 3D shape by actuation mechanisms such as heating. However, 3D surfaces can only be fabricated by self-folding structures when they are flattenable. Most generally designed parts are not flattenable. To address the problem, we develop a shape optimization method to modify a non-flattenable surface into flattenable. The shape optimization framework is equipped with topological operators for adding interior/boundary cuts to further improve the flattenability. When inserting cuts, self-intersection is locally prevented on the flattened 2D pieces. The total length of inserted cuts is also minimized to reduce artifacts on the finally folded 3D shape.
4D Printing for Freeform Surfaces: Design Optimization of Origami and Kirigami Structures
Tsz-Ho Kwok, Charlie C.L. Wang, Dongping Deng, Yunbo Zhang, and Yong Chen
ASME Transactions - Journal of Mechanical Design, Special Issue on Design for Additive Manufacturing, accepted.
[PDF]
[doi:10.1115/1.4031023]
[video]
Abstract:
A self-folding structure fabricated by additive manufacturing can be automatically folded into a demanding 3D shape by actuation mechanisms such as heating. However, 3D surfaces can only be fabricated by self-folding structures when they are flattenable. Most generally designed parts are not flattenable. To address the problem, we develop a shape optimization method to modify a non-flattenable surface into flattenable. The shape optimization framework is equipped with topological operators for adding interior/boundary cuts to further improve the flattenability. When inserting cuts, self-intersection is locally prevented on the flattened 2D pieces. The total length of inserted cuts is also minimized to reduce artifacts on the finally folded 3D shape.
Improvements to the ICP Algorithm for Shape Registration in Manufacturing
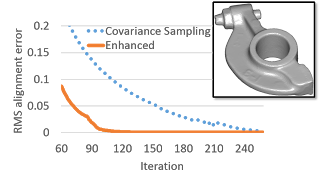
Tsz-Ho Kwok, and Kai Tang
ASME Journal of Manufacturing Science and Engineering, accepted.
[PDF]
[doi]
Abstract:
Iterative Closest Point (ICP) is a popular algorithm used for shape registration while conducting inspection during a production process. A crucial key to the success of ICP is the choice of point selection method. While point selection can be customized for a particular application using its prior knowledge, Normal-Space Sampling is commonly used when normal vectors are available. Normal-based approach can be further improved by stability analysis - called covariance sampling. The stability analysis should be accurate to ensure the correctness of covariance sampling. In this paper, we go deep into the details of covariance sampling, and propose a few improvements for stability analysis. We theoretically and experimentally show that these improvements are necessary for further success in covariance sampling. Experimental results show that the proposed method is more efficient and robust for the ICP algorithm.
Volumetric Template Fitting for Human Body Reconstruction from Incomplete Data
Tsz-Ho Kwok, Kwok-Yun Yeung, and Charlie C.L. Wang
Journal of Manufacturing Systems, Volume 33, Issue 4, October 2014, Pages 678–689.
[PDF]
[doi:10.1016/j.jmsy.2014.05.009]
[video]
Abstract:
In this paper, we present a method for reconstructing 3D human body from incomplete data, which are point clouds captured by inexpensive RGB-D cameras. Making use of the volumetric mesh in a template, the fitting process is robust. This method produces high quality fitting results on incomplete data, which are hard to be offered by the surface fitting based methods. The method is formulated as an optimization procedure, so that the results of volumetric fitting rely on the quality of initial shape (i.e., the shape of template). In order to find a good initial shape, we develop a template selection algorithm to choose a template in an iterative manner by using the statistical models of human bodies. Experimental results show that our method can successfully reconstruct human body with less than 1% anthropometry measurement error.
Shape Optimization for Human-Centric Product with Standardized Components
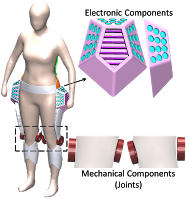
Tsz-Ho Kwok, and Charlie C.L. Wang
Computer-Aided Design, Volume 52, July 2014, Pages 40-50.
[PDF]
[doi:10.1016/j.cad.2014.03.002]
[video]
Abstract:
In this paper, we present an optimization framework for automating the shape customization of human-centric products, which can be mounted on or embedded in human body (such as exoskeletal devices and implants). This kind of products needs to be customized to fit the body shapes of users. At present, the design customization for freeform objects is often taken in an interactive manner that is inefficient. We investigate a method to automate the procedure of customization. Major difficulty in solving this problem is caused by the not freely changed shape of components. They should be selected from a series of standardized shapes. Different from the existing approaches that allow fabricating all components by customized production, we develop a new method to generate customized products by using as-many-as-possible standardized components. Our work is based on a mixed-integer shape optimization framework.
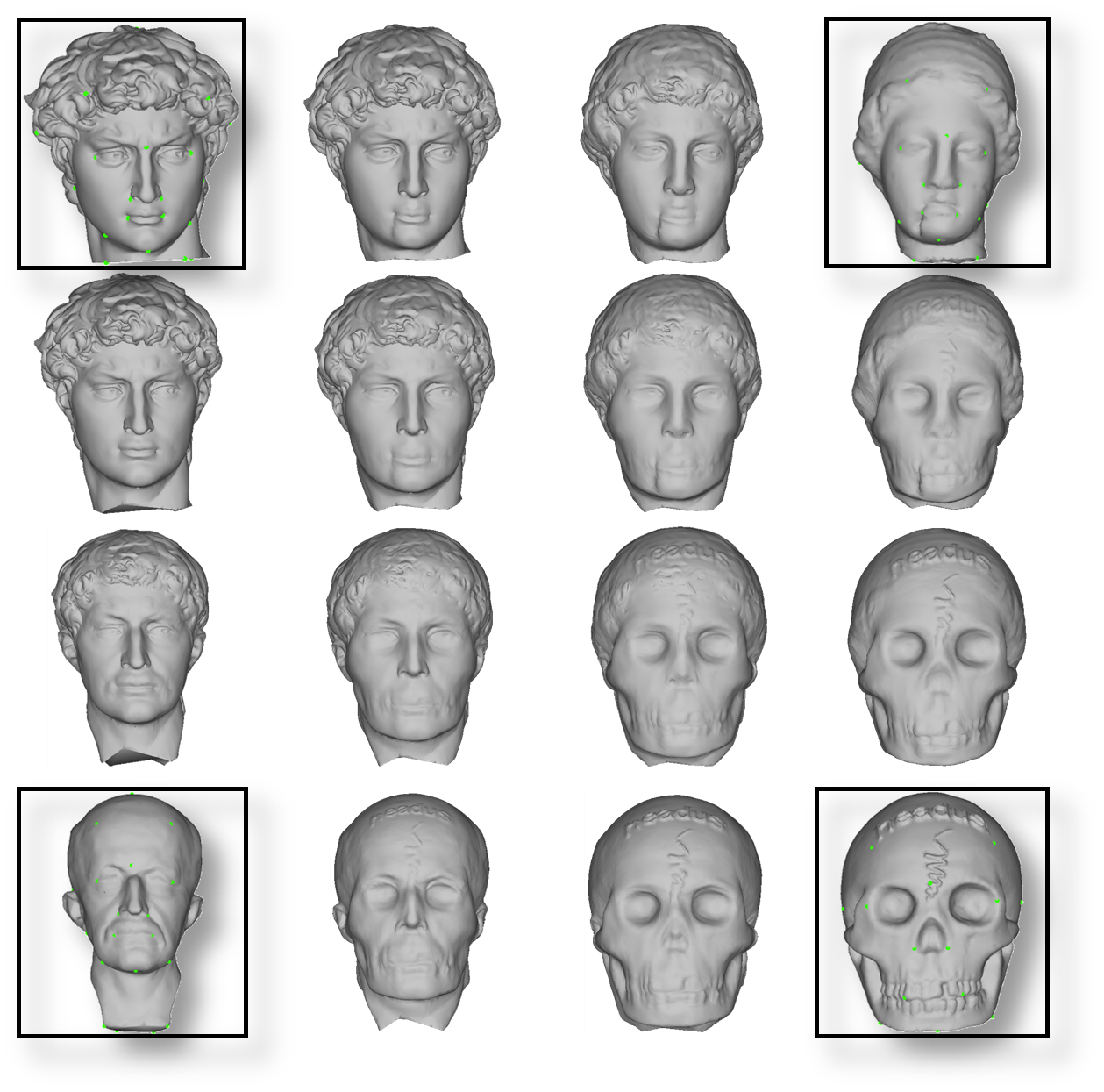
Domain Construction for Volumetric Cross-Parameterization
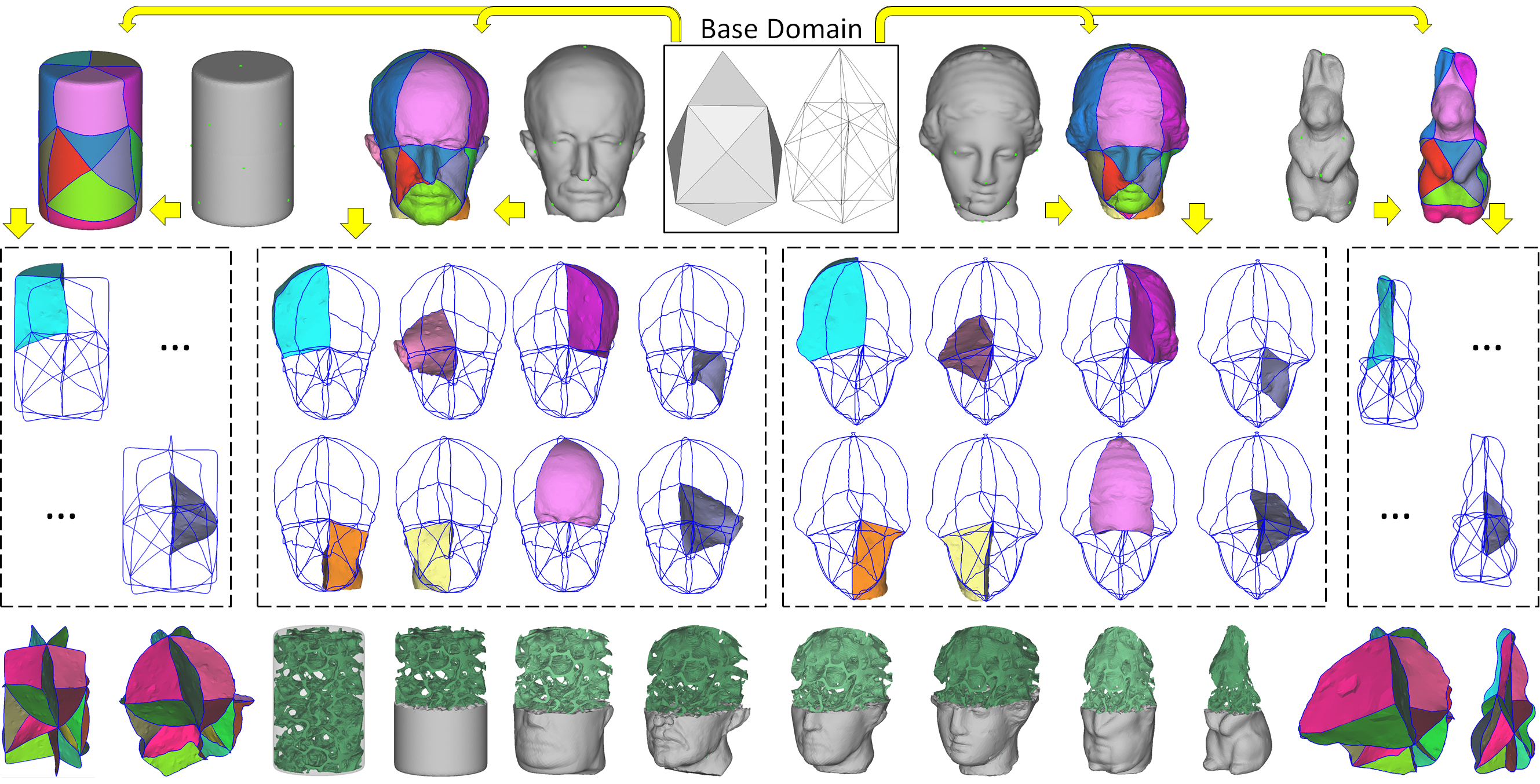
Tsz-Ho Kwok, and Charlie C.L. Wang
Computers & Graphics, Special Issue of CAD/Graphics 2013, November 16-18, 2013, Hong Kong, Volume 38, February 2014, Pages 86-96. Acceptance rate: 9% (31/344).
[PDF]
[doi:10.1016/j.cag.2013.10.026]
[Best Paper Honorable Mention]
Abstract:
We present an algorithm in this paper for constructing volumetric domains with consistent topology to parameterize
three-manifold solid models having homeomorphic topology. The volumetric parameterizations generated by our approach
share the same set of base domains and are constrained by the corresponding anchor points. Our approach allows users
to control interior mappings by specifying interior anchor points, and the anchor points are interpolated exactly.
With the help of a novel construction algorithm developed in this work, the volumetric cross-parameterization computed
by our method demonstrates its functionality in several examples.
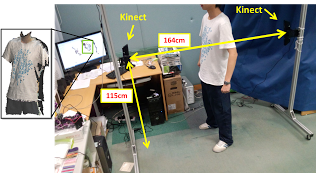
Improved skeleton tracking by duplex Kinects: a practical approach for real-time applications
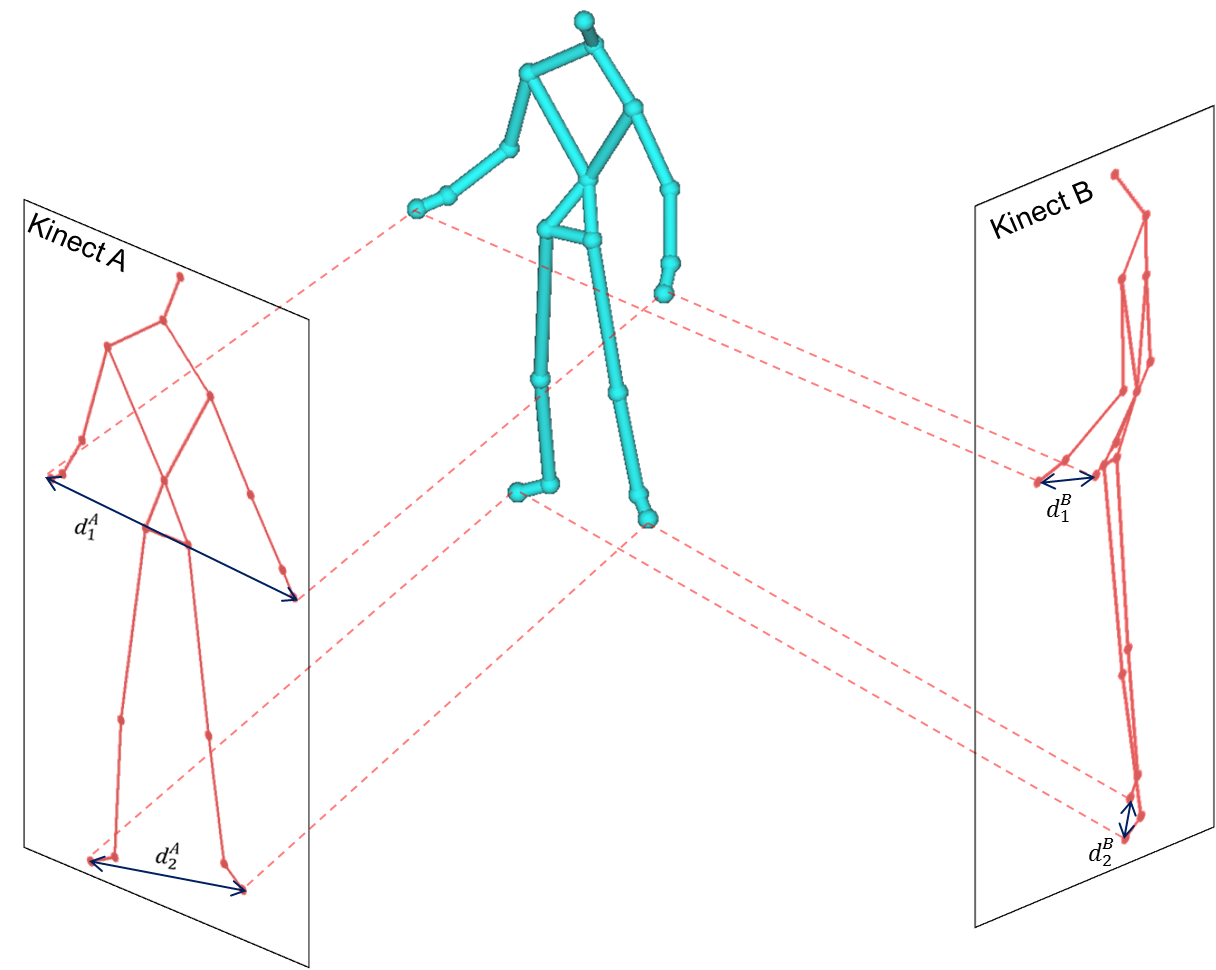
Kwok-Yun Yeung, Tsz-Ho Kwok, and Charlie C.L. Wang
ASME Transactions - Journal of Computing and Information Science in Engineering, vol.13, no.4, 041007 (10 pages), October 2013.
[PDF]
[doi:10.1115/1.4025404]
[video]
Abstract:
Recent development of per-frame motion extraction method can generate the skeleton
of human motion in real-time with the help of RGB-D cameras such as Kinect.
This leads to an economic device to provide human motion as input for real-time applications.
As generated by a single-view image plus depth information,
the extracted skeleton usually has problems of unwanted vibration,
bone-length variation, self-occlusion, etc.
This paper presents an approach to overcome these problems by synthesizing the
skeletons generated by duplex Kinects, which capture the human motion in different views.
The major technical difficulty of this synthesis comes from the inconsistency of two skeletons.
Our algorithm is formulated under the constrained optimization framework by using
the bone-lengths as hard constraints and the tradeoff between inconsistent joint positions as
soft constraints. Schemes are developed to detect and re-position the problematic joints
generated by per-frame method from duplex Kinects. As a result, we develop an easy, cheap and
fast approach that can improve the skeleton of human motion at an average speed of 5ms per frame.
Constructing common base domains by cues from Voronoi diagram
Tsz-Ho Kwok, Yunbo Zhang, Charlie C.L. Wang
Graphical Models, Special Issue of 2012 Geometric Modeling and Processing (GMP) conference, June 20-22, 2012, Mount Huang, Volume 74, Issue 4, July 2012, Pages 152-163.
[doi:10.1016/j.gmod.2012.03.012]
[project page]
Abstract:
In this paper, we propose a novel algorithm to construct common base domains for cross-parameterization
constrained by anchor points. Based on the common base domains, a bijective mapping between given models
can be established. Experimental results show that the distortion in a cross-parameterization generated
on our common base domains is much smaller than that of a mapping on domains constructed by prior methods.
Different from prior algorithms that generate domains by a heuristic of having higher priority to link the
shortest paths between anchor points, we compute the surface Voronoi diagram of anchor points to find out
the initial connectivity for the base domains. The final common base domains can be efficiently generated
from the initial connectivity. The Voronoi diagram of the anchor points gives better cues than the heuristic
of connecting shortest paths greedily, therefore resulting in an efficient and reliable algorithm for
construction of common base domains that bring to low distortion in constrained cross-parameterization.
Efficient Optimization of Common Base Domains for Cross-Parameterization

Tsz-Ho Kwok, Yunbo Zhang, Charlie C.L. Wang
Visualization and Computer Graphics, IEEE Transactions on , vol.18, no.10, pp.1678-1692, Oct. 2012
[doi:10.1109/TVCG.2011.115]
[project page]
Abstract:
Given a set of corresponding user-specified anchor points on a pair of models having similar features and topologies,
the cross-parameterization technique can establish a bijective mapping constrained by the anchor points. In this paper, we
present an efficient algorithm to optimize the complexes and the shape of common base domains in cross-parameterization
for reducing the distortion of the bijective mapping. The optimization is also constrained by the anchor points. We investigate
a new signature, Length-Preserved Base Domain (LPBD), for measuring the level of stretch between surface patches in crossparameterization.
This new signature well balances the accuracy of measurement and the computational speed. Based on LPBD,
a set of metrics are studied and compared. The best ones are employed in our domain optimization algorithm that consists of two
major operators, boundary swapping and patch merging. Experimental results show that our optimization algorithm can reduce
the distortion in cross-parameterization efficiently.
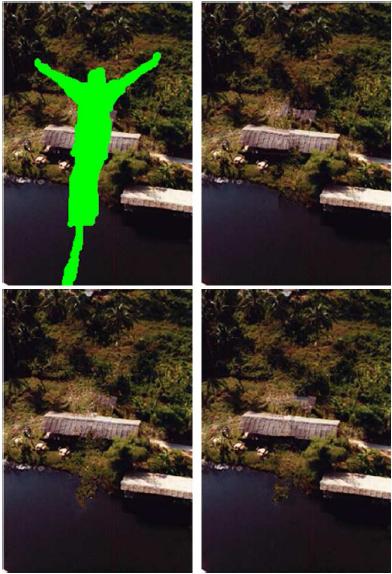
Fast Query for Exemplar-Based Image Completion
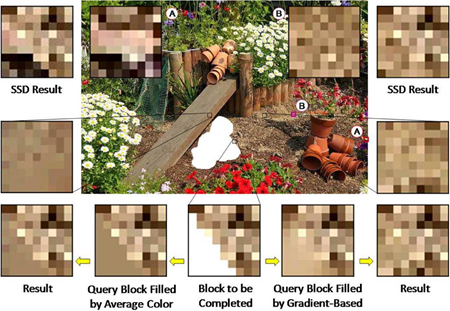
Tsz-Ho Kwok, Hoi Sheung, Charlie C.L. Wang
Image Processing, IEEE Transactions on , vol.19, no.12, pp.3106-3115, Dec. 2010
[doi:10.1109/TIP.2010.2052270]
[some images]
Abstract:
In this paper, we present a fast algorithm for filling unknown
regions in an image using the strategy of exemplar-matching. Unlike the original
exemplar-based method using exhaustive search, we decompose exemplars into the frequency
coefficients and select fewer coefficients which are the most significant to evaluate
the matching score. We have also developed a local gradient-based algorithm to fill the
unknown pixels in a query image block. These two techniques bring the ability of input
with varied dimensions to the fast query of similar image exemplars. The fast query is
based on a search-array data structure, and can be conducted very efficiently. Moreover,
the evaluation of search-arrays runs in parallel maps well on the modern graphics hardware
with Graphics Processing Units (GPU). The functionality of the approach has been demonstrated
by experimental results on real photographs.
Exemplar-based statistical model for semantic parametric design of human body
Chih-Hsing Chu, Ya-Tien Tsai, Charlie C.L. Wang, and Tsz-Ho Kwok
Computers in Industry, vol.61, no.6, pp.541-549, August 2010.
[doi:10.1016/j.compind.2010.03.004]
Abstract:
This paper presents an exemplar-based method to provide intuitive
way for users to generate 3D human body shape from semantic parameters. In our approach,
human models and their semantic parameters are correlated as a single linear system of
equations. When users input a new set of semantic parameters, a new 3D human body will be
synthesized from the exemplar human bodies in the database. This approach involves simpler
computation compared to non-linear methods while maintaining quality outputs. A semantic
parametric design in interactive speed can be implemented easily. Furthermore, a new method
is developed to quickly predict whether the parameter values is reasonable or not, with the
training models in the human body database. The reconstructed human bodies in this way will
all have the same topology (i.e., mesh connectivity), which facilitates the freeform design
automation of human-centric products.
Interactive Image Inpainting Using DCT Based Exemplar Matching
Tsz-Ho Kwok, Charlie C.L. Wang
International Symposium on Visual Computing 2009, Part II,
LNCS 5876, pp. 709--718. Springer, Heidelberg (2009).
[LNCS]
[plugin for photoshop]
if you meet any problems of using the plugin or find any bugs, please kindly send email to me.
Abstract:
We present a novel algorithm of exemplar-based image in-painting
which can achieve an interactive response and generate results
with good quality. In this paper, we modify exemplar-based method with
the use of Discrete Cosine Transformation (DCT) for the strategy of exemplar matching.
We decompose exemplars by DCT and evaluate the matching score with fewer coefficients,
which is unprecedented in image inpainting. The reason why using fewer coefficients
is so important is that the efficiency of Approximate Nearest Neighbor (ANN) search drops
significantly when using high dimensions. We have also developed a local gradient-based
filling algorithm to complete the image blocks with unknown pixels so that the ANN search
can be adopted to speed up the matching while preserving the continuity of image.
Experimental results prove the advantage of this proposed method.