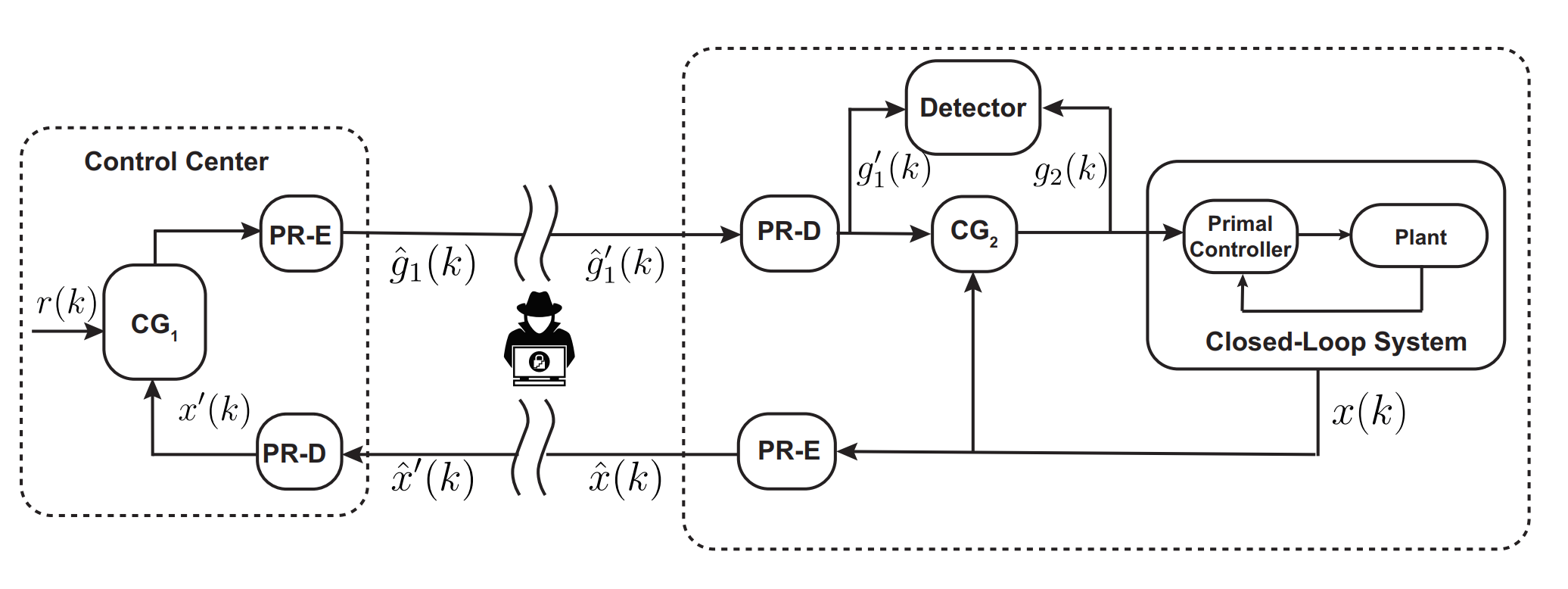
In this paper, we consider remotely maneuvered differential-drive robots whose tracking controller is implemented on-board while the desired reference signal is generated by a remote control center and transmitted using a wireless communication channel potentially prone to cyber-attacks. Here, we develop a novel networked control architecture that allows the robot to track a given reference signal while enabling, on the robot’s side, the detection of false data injections on the setpoint (reference) signal. The proposed solution takes advantage of a feedback linearized model of the vehicle kinematic model, a detector unit, and the coupled actions of two distributed predictive command governor modules installed at the two ends of the communication channel. We show that the resulting architecture guarantees constraints fulfillment and the absence of stealthy setpoint attacks. Laboratory experiments on a Khepera IV robot testify the effectiveness of the proposed solution
M. Cersullo*, C. Tiriolo*, W Lucia, and G. Franze’. A detection strategy for setpoint attacksagainst differential-drive robots. IEEE Transactions on COntrol of NEtwork Systems (CONES), 2025