A detection strategy for setpoint attacks against differential-drive robots, CONES 2025
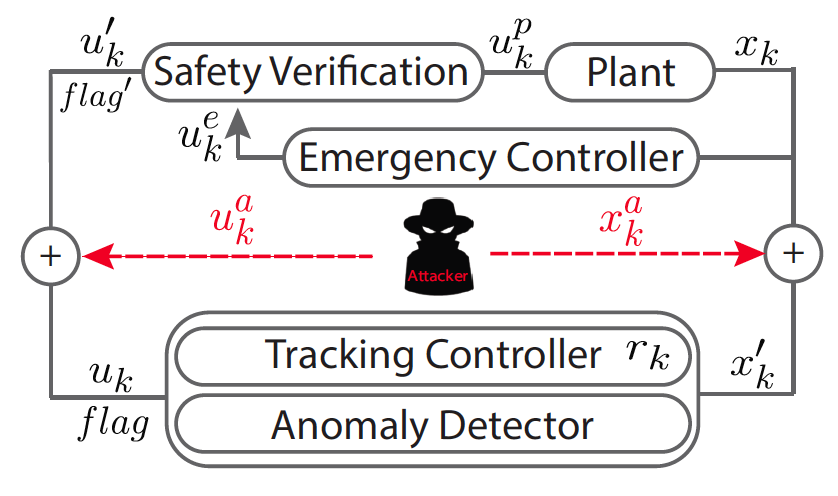
A data-driven safety preserving control architecture for constrainedcyber-physical systems, IJRNC 2024
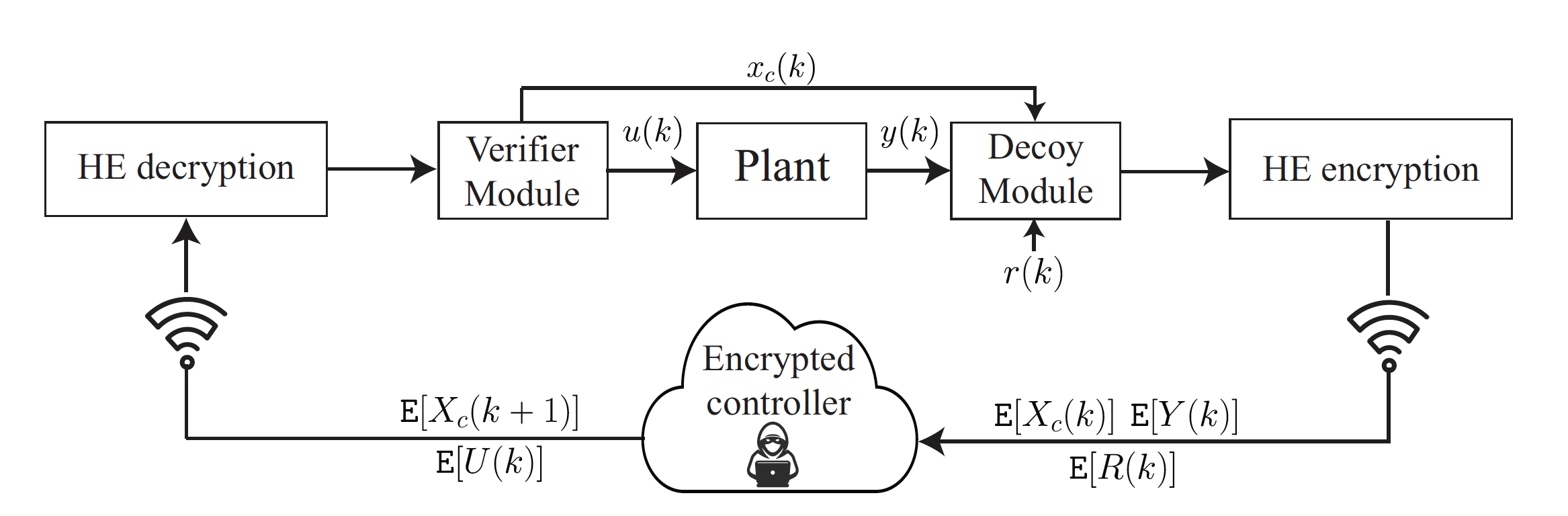
A Verifiable Computing Scheme for EncryptedControl Systems, IEEE L-CSS, 2024
A Set-Theoretic Control Approach to the Trajectory Tracking Problem for Input-Output Linearized Wheeled Mobile Robots, IEEE L-CSS, 2023
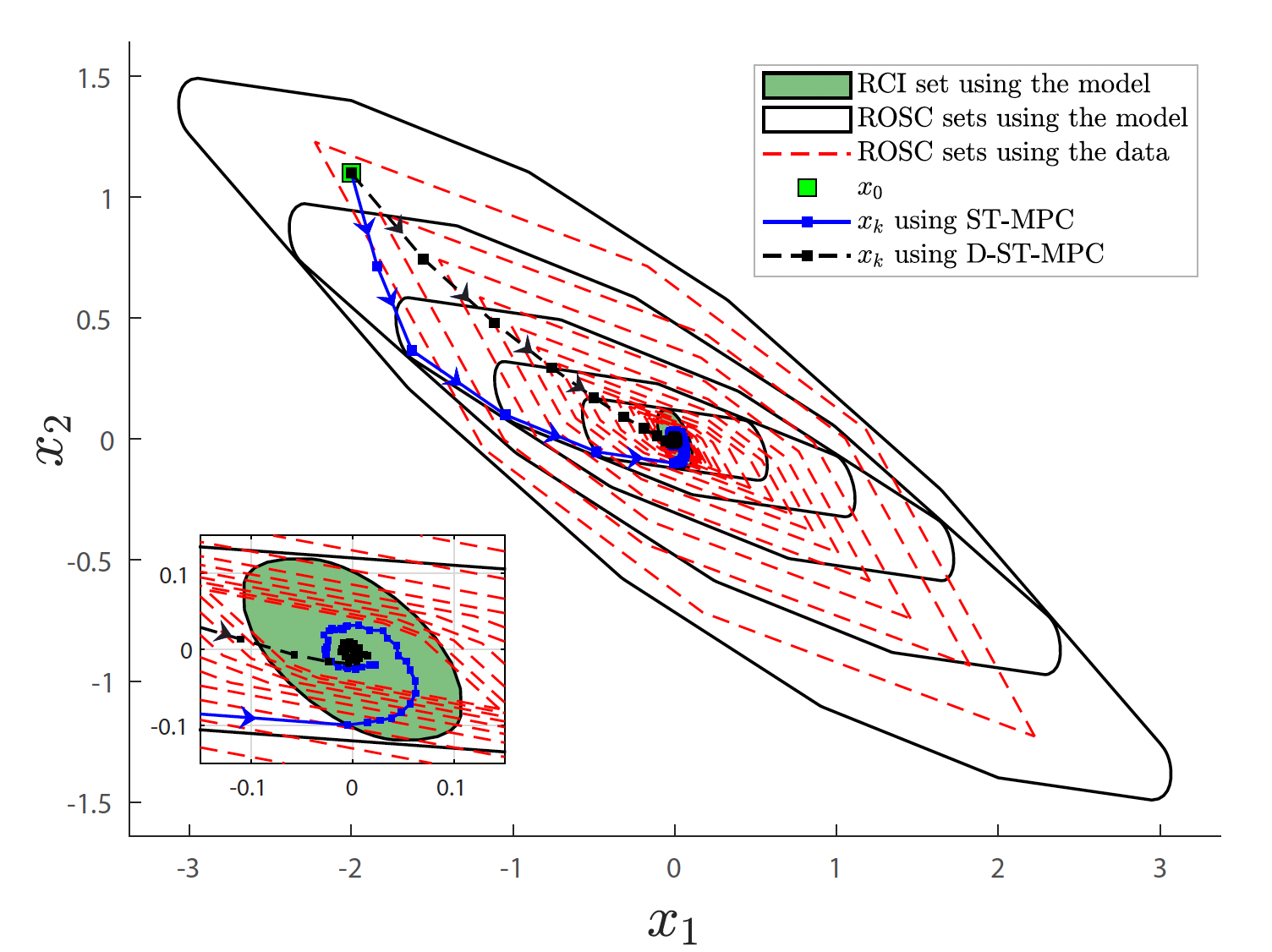
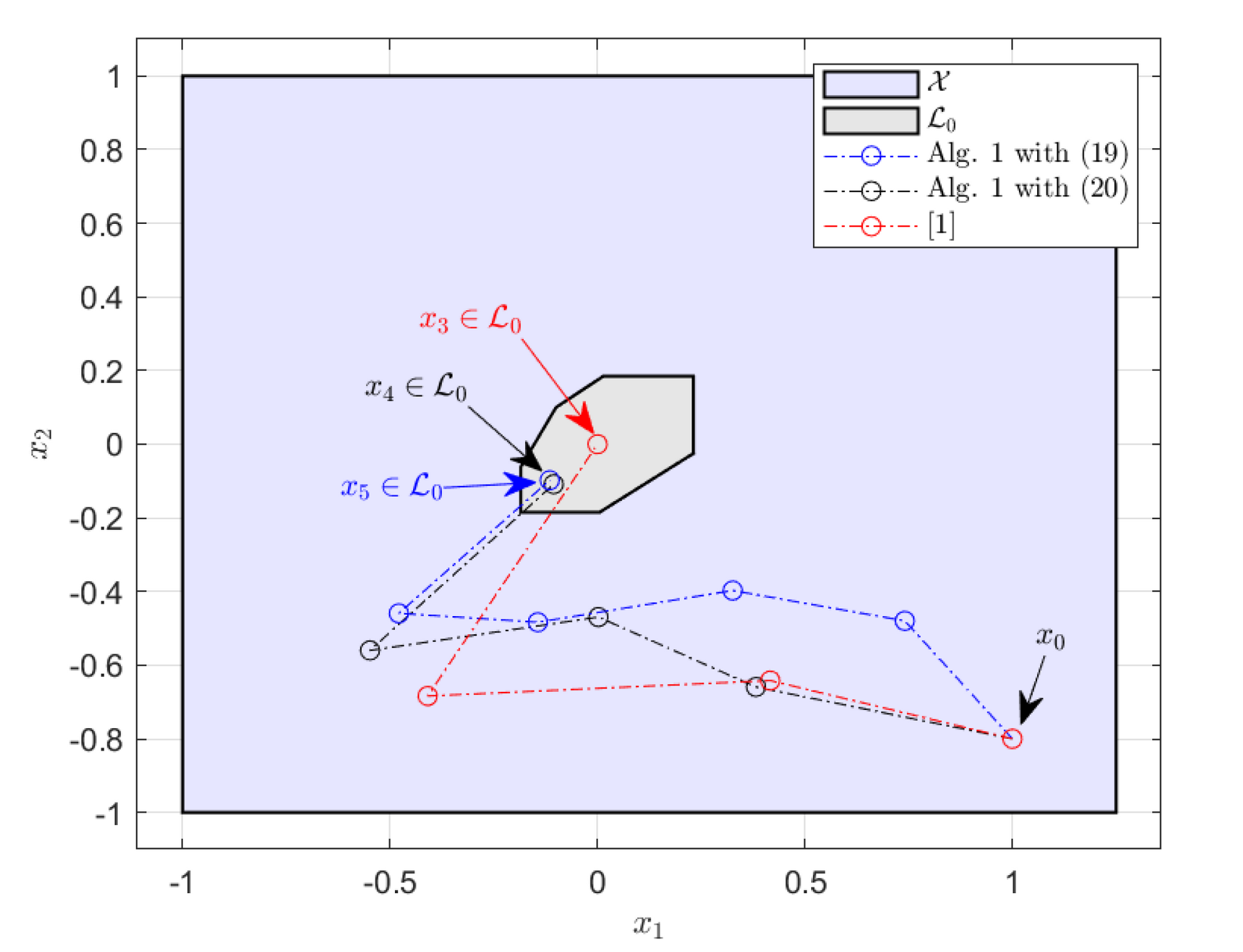
Data-Driven Robust Backward Reachable Sets for Set-Theoretic Model Predictive Control," IEEE L-CSS, 2023
On the design of constrained PI-like output feedback tracking controllers via robust positive invariance and bilinear programming
Set-theoretic output feedback control: a bilinear programming approach," Automatica, 2023
On the Design of Control Invariant Regions for Feedback Linearized Car-Like Vehicles," L-CSS 2022
A Receding Horizon Trajectory Tracking Strategy for Input-Constrained Differential-Drive Robots via Feedback-Linearization," TCST 2022