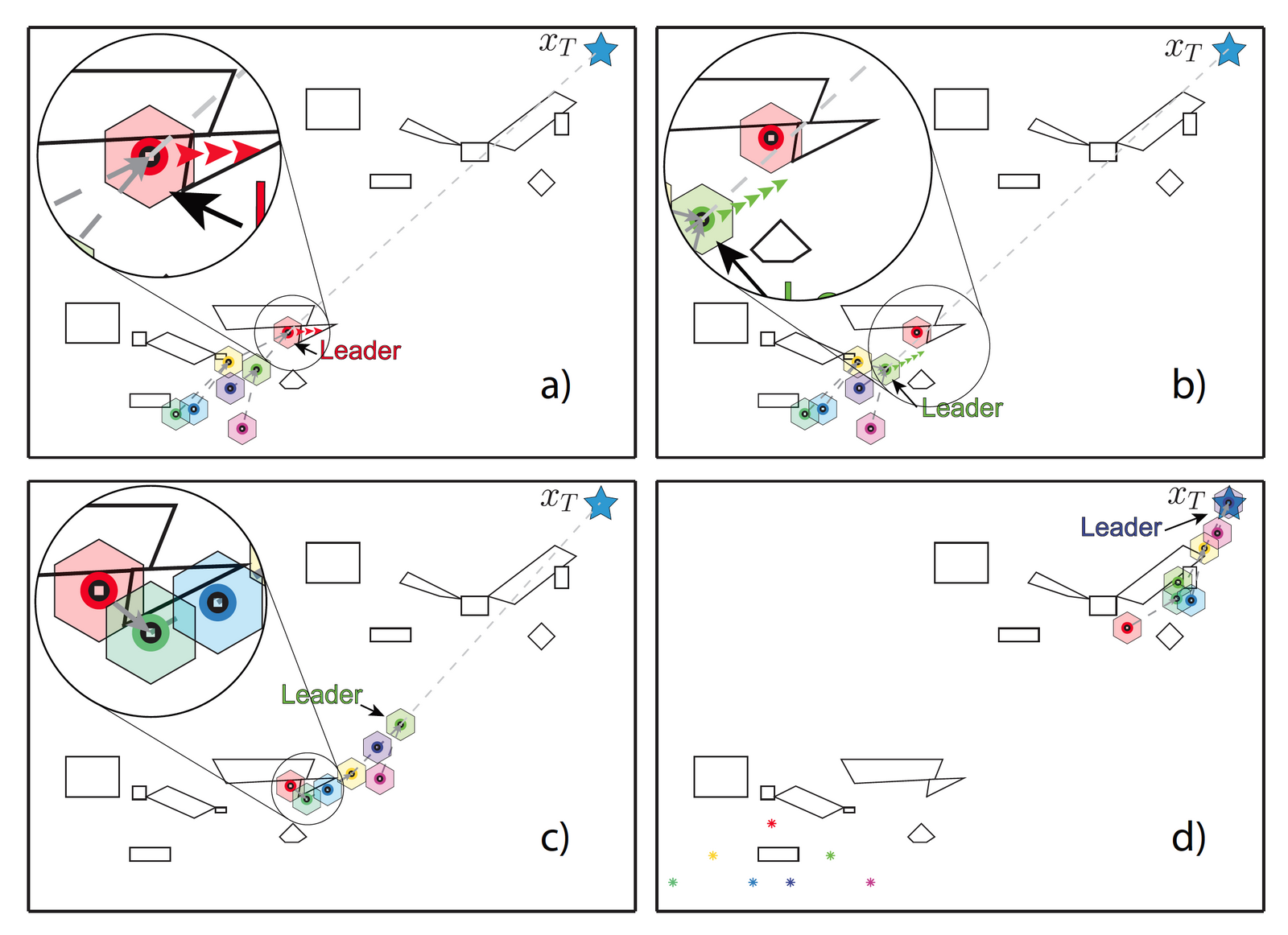
In this paper, we propose a distributed model predictive control strategy for a team of vehicles moving in an unknown obstacle scenario. In particular, we combine receding horizon control arguments with leader-follower formations in order to design a flexible architecture where the vehicle topology if needed, can be rearranged to better cope with the presence of obstacles. Each vehicle is equipped with an ad-hoc dual-mode controller in charge of tracking along the leader-follower chain the predecessor vehicle (namely the target for the leader) and ensuring absence of collisions. Moreover, whenever the leader recognizes that the obstacle scenario obstructs its navigation, the current formation is properly reconfigured by preserving recursive feasibility and obstacle avoidance properties. Final numerical results on a team of seven point mobile robots are instrumental to show the main features of the proposeddistributed model predictive control algorithm.
G. Franze', W. Lucia, A. Venturino , IEEE Transactions on Intelligent Vehicles ( Volume: 6, Issue: 2, June 2021)