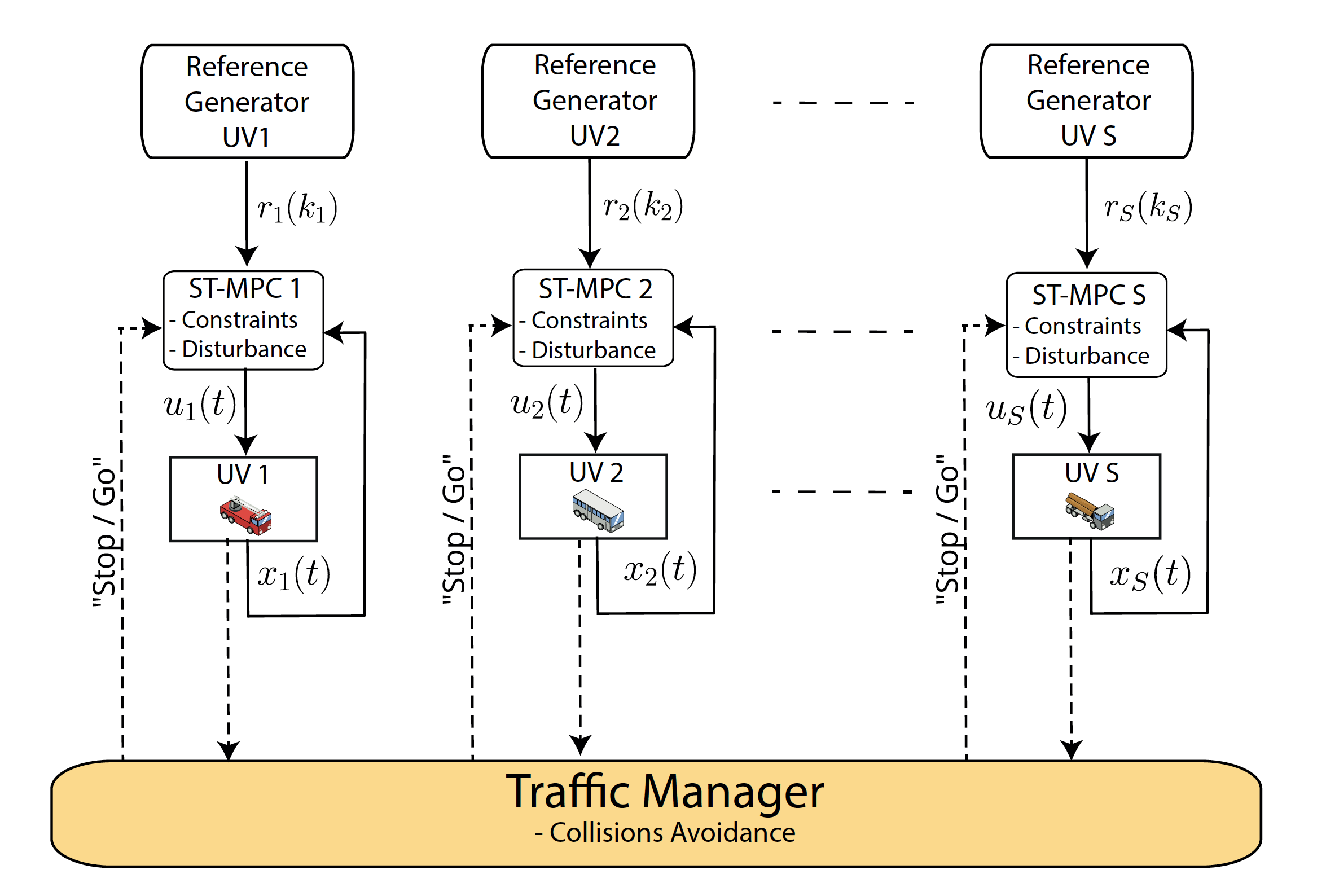
In this paper, we face the reference tracking control problem for a system of heterogeneous Multi Unmanned Vehicles (MUVs) moving in a 2-D planar environment. We consider a scenario where each vehicle follows a trajectory imposed by a local planner and where each UV can have different linear dynamics as well as different constraints and disturbances. In this contest, we design a novel control architecture where a centralized traffic manager, in conjunction with ad-hoc designed local vehicle controllers, is capable of ensuring the absence of collisions. The proposed solution is obtained by exploiting, for the local vehicles' controllers, a dual-mode Model Predictive Controller (MPC) and, for the traffic manager, set-theoretic and controllability properties. Moreover, after modeling the potential vehicle collisions with a graph, connectivity arguments are used to obtain an optimal collision resolution which minimizes the number of vehicles that need to be stopped. The resulting control scheme ensures collision-free signal tracking. Simulation results, conducted on a MUV system are shown to provide tangible evidence of the features of the proposed framework.
Authors: Maryam Bagherzadeh, Shima Savehshemshaki, Walter Lucia, Accepted for Publications in IEEE Transactions on Automatic Control (TAC), DOI 10.1109/TAC.2021.3093280, 2021